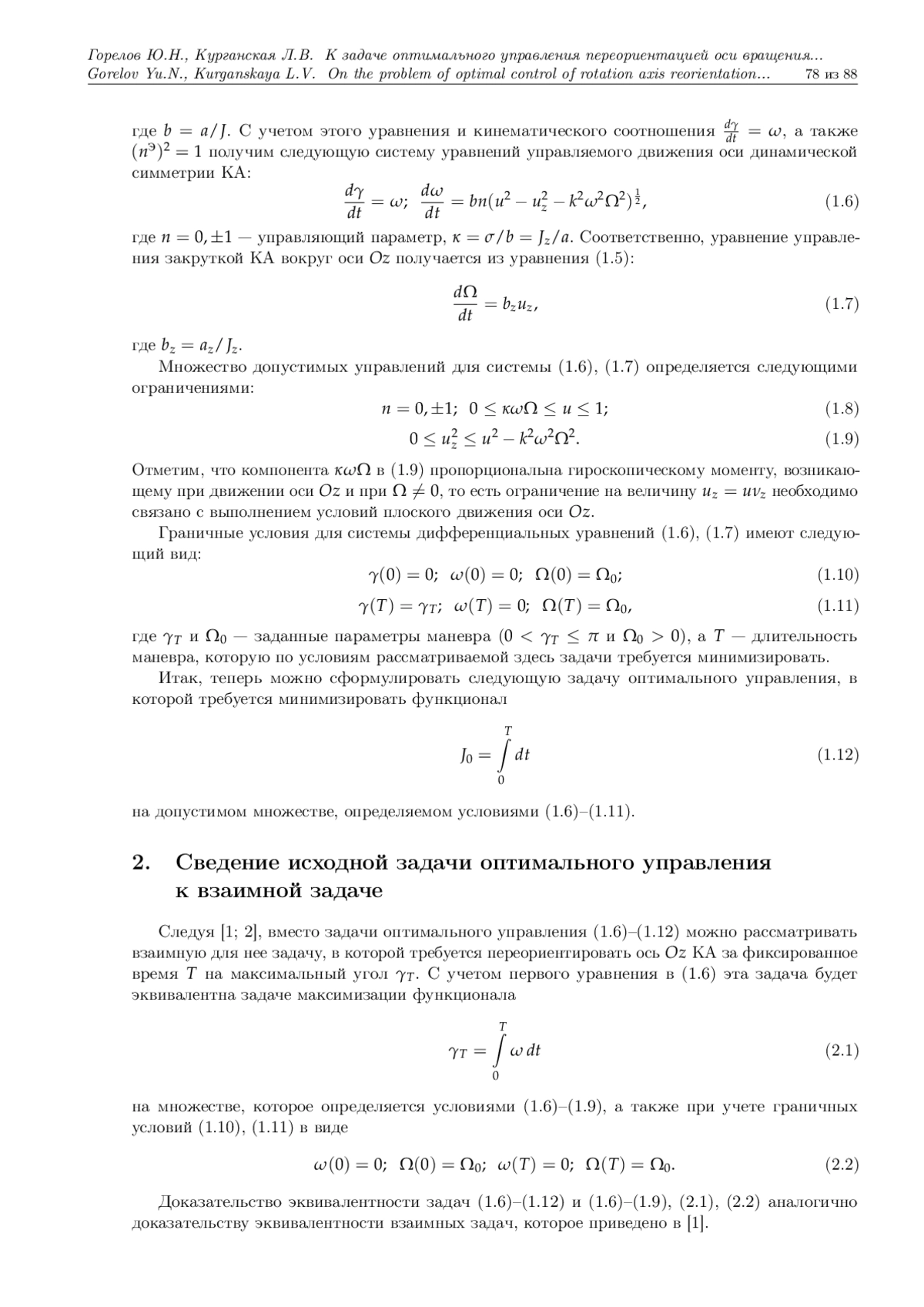
Рассматриваются различные варианты постановки задачи оптимального управления переориентацией оси динамической симметрии космического аппарата, являющейся осью закрутки. Предполагается, что решение этой задачи должно отыскиваться в классе движений с одним направленным (плоским) поворотом при условии, что до и после переориентации оси вращения угловая скорость закрутки космического аппарата одинакова. При этом управление угловым движением космического аппарата осуществляется по схеме .поворотного реактивного двигателя., когда вектор управляющего момента ограничивается эллипсоидом вращения. Приведена соответствующая математическая модель движения космического аппарата для рассматриваемой задачи управления. Кроме постановки задачи о наискорейшей переориентации оси вращения космического аппарата также сформулирована взаимная к ней задача оптимального управления, для которой найдено оптимальное управление для полного управляющего момента. С целью проведения дальнейшего анализа рассматриваемой задачи управления приводятся также результаты её сведения к краевой задаче и к изопериметрической вариационной задаче.
Предпросмотр статьи

Идентификаторы и классификаторы
Если у вас возникли вопросы или появились предложения по содержанию статьи, пожалуйста, направляйте их в рамках данной темы.