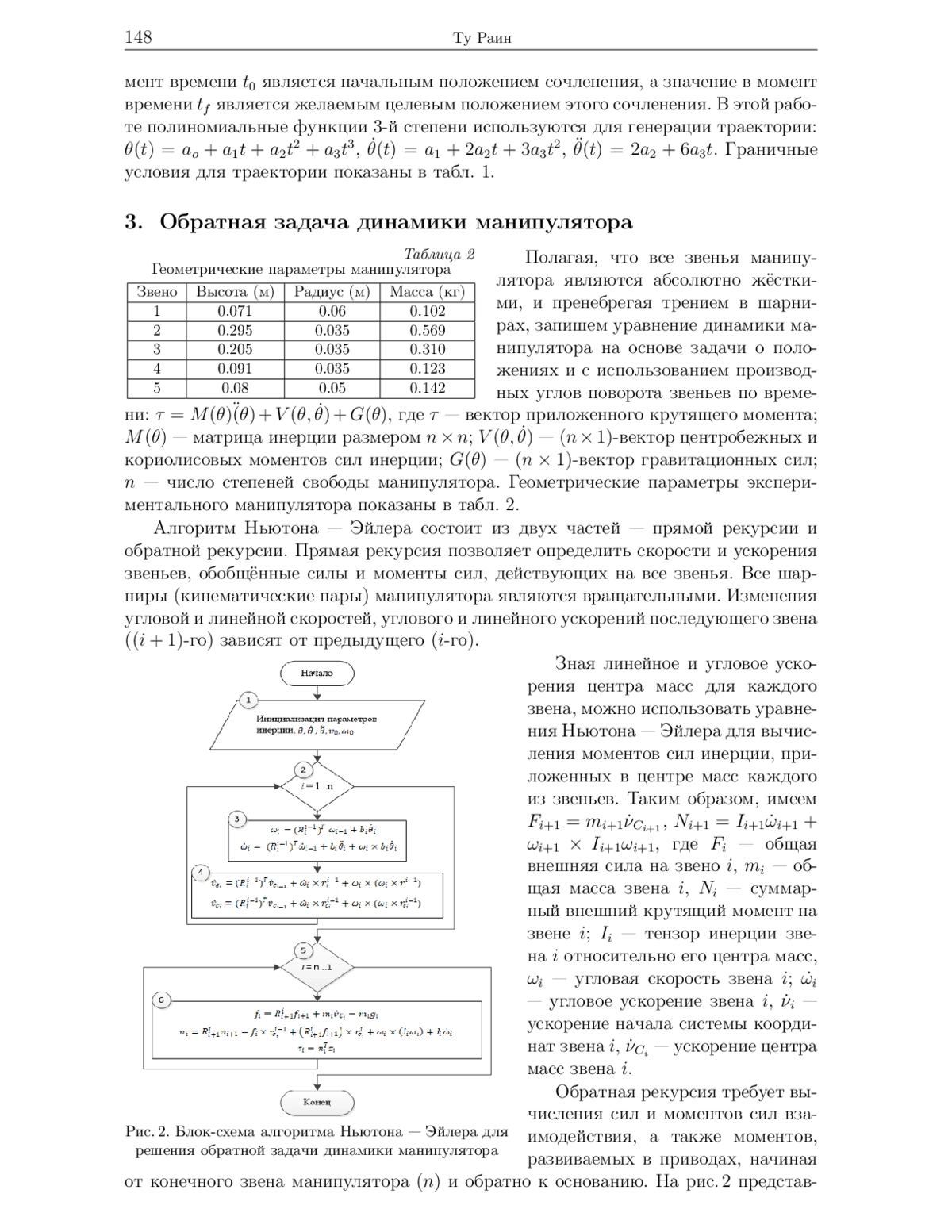
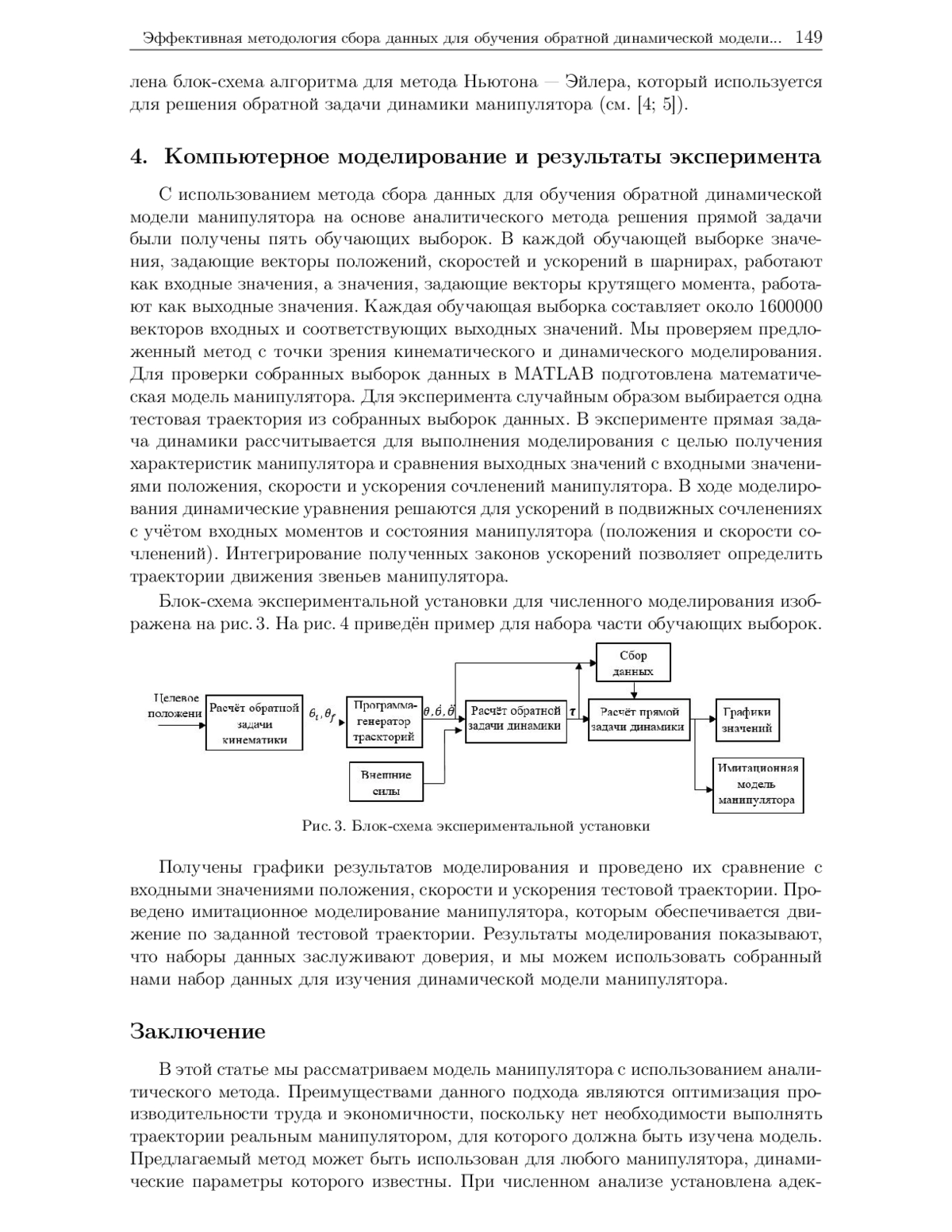
Рассматривается параметрическая модель манипулятора, полученная из динамики твёрдого тела с использованием аналитического метода. Применяются метод Денавита Хартенберга для создания рабочей зоны манипулятора, метод Левенберга Марквардта для нахождения требуемых положений сочленений для достижения целевых точек, метод кубических полиномов для построения траектории между двумя точками и метод Ньютона Эйлера для нахождения требуемого крутящего момента, для получения желаемой траектории. Полученные наборы данных подтверждены результатами моделирования кинематического и динамического моделирования тестируемого манипулятора.
Предпросмотр статьи
Идентификаторы и классификаторы
Если у вас возникли вопросы или появились предложения по содержанию статьи, пожалуйста, направляйте их в рамках данной темы.