
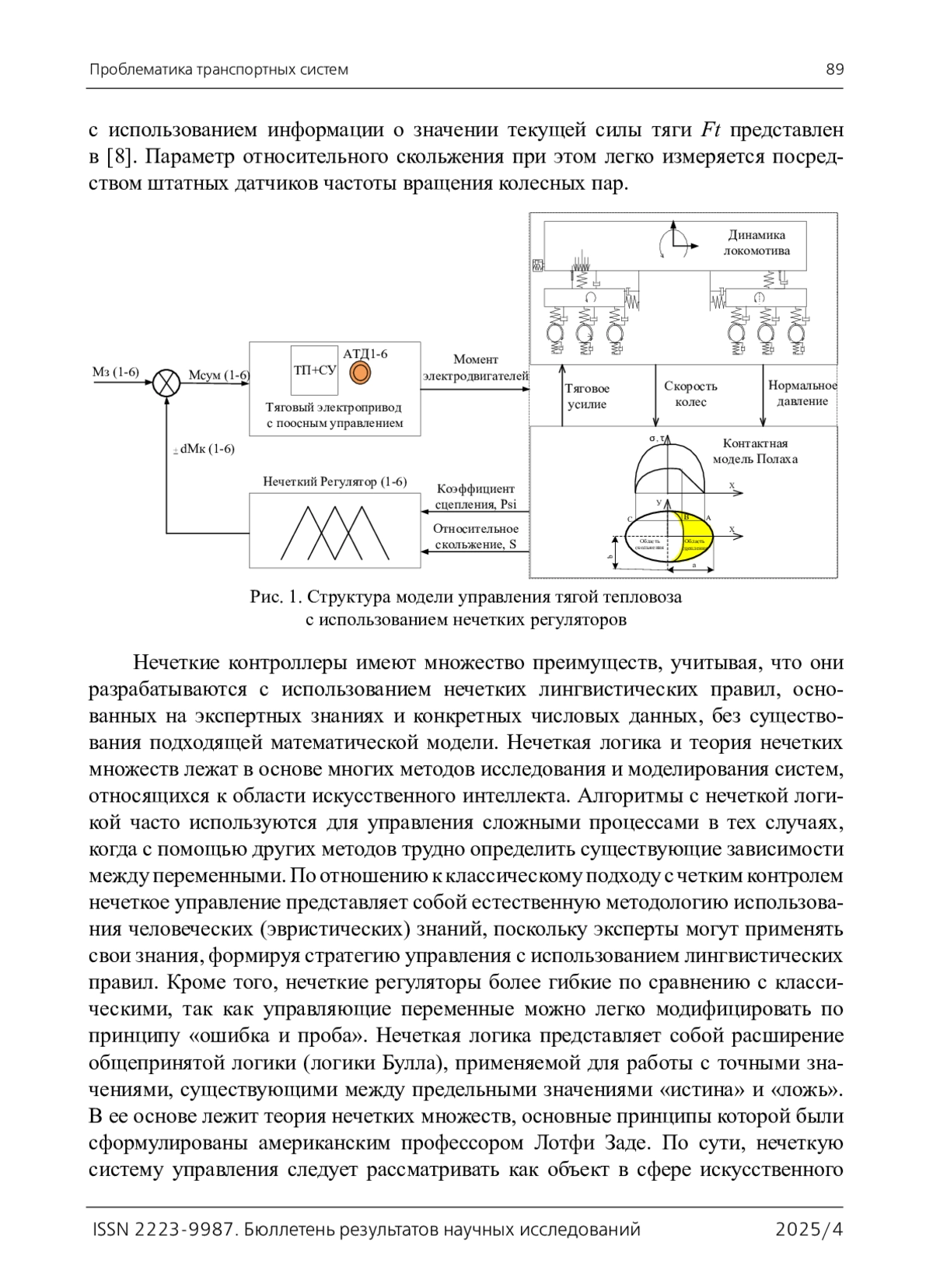
Цель: Разработать алгоритм управления тяговым усилием локомотива для максимизации тяговых свойств при переменном сцеплении и минимизации проскальзывания в системе «колесо — рельс». Методы: Использование аппарата нечеткой логики, теории нечетких множеств и нечетких логических функций, элементов искусственного интеллекта, теории автоматического управления, методов математического моделирования. Результаты: Представлена структурная схема системы регулирования тягового усилия локомотива, реализованная на базе регулятора с нечеткой логикой. Регулятор оптимизирует параметры скольжения колесных пар для обеспечения максимальной силы тяги локомотива в условиях изменяющегося сцепления. Правила нечеткого управления сформированы на основе экспертных лингвистических оценок положения рабочей точки на кривой зависимости коэффициента сцепления. При этом отсутствует необходимость в точной математической модели, описывающей процессы в системе «колесо — рельс». Алгоритм нечеткого управления разработан в среде MATLAB с применением инструментария Fuzzy Logic Toolbox. Проведено математическое моделирование функционирования нечеткого регулятора с использованием ранее разработанной полномасштабной продольно-вертикальной динамической модели тепловоза 2ТЭ25А. Практическая значимость: Результаты моделирования доказывают эффективность предложенной системы управления на основе нечеткой логики, показывают высокие тяговые свойства тепловоза при изменении состояния рельсов во всем скоростном диапазоне. Разработанный алгоритм управления тягой локомотива может быть использован при проектировании и внедрении в эксплуатацию перспективных высокоэффективных систем защиты от боксования и юза, позволяющих существенно повысить тяговые свойства локомотивов при оптимальном износе в системе «колесо — рельс».
Предпросмотр статьи

Идентификаторы и классификаторы
- SCI
- Машиностроение
Сцепление между колесом и рельсом является решающим фактором для реализации заявленных тяговых качеств любого локомотива. Используемый в настоящее время в технической литературе термин «защита от боксования» в связи с широким внедрением микропроцессорных, высокоинтеллектуальных систем управления тягой, совершенствования силовой части электроприводов, по нашему мнению, несколько устарел. Более точный термин — «регулируемое скольжение» подразумевает не просто защиту от боксования, а обеспечивает поддержание тяговых свойств локомотива на максимально возможном уровне, при этом не допуская чрезмерного износа в системе «колесо — рельс» [1, 2].
Если у вас возникли вопросы или появились предложения по содержанию статьи, пожалуйста, направляйте их в рамках данной темы.
Список литературы
1. Космодамианский А. С. Новые методы предотвращения боксования локомотивов и возможность их реализации / А. С. Космодамианский, О. В. Измеров, С. О. Копылов, В. О. Корчагин // Эксплуатационная надежность локомотивного парка и повышение эффективности тяги поездов: материалы третьей всероссийской научно-технической конференции с международным участием. - Омск, 2016. - С. 182-189.
2. Патент RU 2845291 Российская Федерация. Способ обнаружения боксования и юза колес транспортного средства с электрической передачей: заявл. 03.02.2025: опубл. 15.08.2025 / К. С. Перфильев, В. В. Грачев, А. В. Грищенко, Ф. Ю. Базилевский и др. - 17 с.
3. Волохов Г. М. Разработка двухмерной динамической модели шестиосного тепловоза с учетом условий сцепления в контакте “колесо - рельс” / Г. М. Волохов, К. С. Перфильев // Вестник ВНИКТИ. - 2025. - Вып. 108. - С. 110-128.
4. Polach O. A Fast Wheel - Rail Forces Calculation Computer Code / O. Polach // Vehicle System Dynamics. - 1999. - Vol. 33. - Pp. 728-739.
5. Polach O. Creep forces in simulations of traction vehicles running on adhesion limit / O. Polach // Wear. - 2005. - Vol. 258. - Pp. 992-1000.
6. Polach O. Influence of Locomotive Tractive Effort on the Forces Between Wheel and Rail / O. Polach // Vehicle System Dynamics. - 2001. - Vol. 35. - Pp. 7-22. 7. Меншутин Н. Н. Зависимость между силой сцепления и скоростью скольжения колесной пары локомотива / Н. Н. Меншутин // Вестник ВНИИЖТ. - 1960. - № 7. - С. 12-16.
7. Djukic M. A fuzzy model for an increase in locomotive traction force / M. Djukic, S. Rusov, Z. Mitrović // Transport. - 2010. - Vol. 25. - Pp. 36-45.
Выпуск
Другие статьи выпуска

Исследование посвящено глобальным тенденциям развития пассажирского транспорта в агломерациях, а также адаптации институтов и инструментов транспортной политики в городских агломерациях России на примере Санкт-Петербурга. Цель: Выявление ключевых направлений развития городских транспортных систем агломераций и оценка степени их институционализации и практической реализации в программе развития транспортной системы Санкт-Петербурга; разработка предложений по актуализации программы, направленных на повышение качества городской мобильности и укрепление агломерационной связности. Методы: Систематизация научной литературы, сопоставительный анализ международных практик развития транспортных систем крупных городов, анализ программных документов развития транспортной системы Санкт-Петербурга. Результаты: Сформирована типология актуальных направлений (приоритет общественного транспорта; интермодальность и тарифная интеграция; управление спросом на индивидуальные поездки; экологизация и цифровизация), выделены факторы трансформации рынка городских пассажирских перевозок. Проведен анализ степени реализации ключевых мер в программе развития городского транспорта Санкт-Петербурга. Выявлено, что применение международных практик в транспортной политике Санкт-Петербурга носит частичный характер; идентифицированы разрывы, которые ограничили масштабируемость и системный эффект мер, а именно: отсутствие закрепленных стандартов тактовости и пересадки, разрывность коридоров приоритета общественного транспорта, неполная городско-агломерационная тарифная интеграция, слабая межтерриториальная координация показателей качества. Даны научно обоснованные рекомендации по дальнейшей адаптации международных практик развития городского транспорта к условиям Санкт-Петербургской агломерации. Результаты могут быть использованы органами управления и операторами при актуализации программ развития городских транспортных систем.

Цель: Выполнить анализ существующих методик стратегического развития предприятия для оценки возможности их применения в условиях санкционного давления. Предложить рекомендации по формированию долгосрочной стратегии в условиях нестабильной внешнеэкономической среды, а также усовершенствовать методики стратегического планирования. Методы: Анализ и синтез, сравнительный анализ, экономико-статистические подходы, экспертные оценки. Результаты: Выполнен анализ существующих подходов стратегического развития. Изучены результаты влияния санкций на экономику страны. Предложены рекомендации по формированию долгосрочной стратегии в условиях нестабильной внешнеэкономической среды, инструментарий для более эффективного стратегического планирования, который может найти применение на предприятии любой отрасли промышленности. Практическая значимость: Использование сценарного подхода при оценке текущей производственной стратегии позволит разработать для промышленных предприятий более детализированный план стратегического развития с учетом рисков и факторов неопределенности, обусловленных санкционным давлением. Представление стратегии развития в форме «дерева решений» даст возможность наглядно выявить и проанализировать сильные и слабые стороны деятельности предприятия, а также сформировать наиболее эффективную стратегию его развития.

Цель: Оценить целесообразность организации перевозок контейнерных грузов с использованием фитинговых платформ в железнодорожной логистике. Определить порядок оказания транспортно‑экспедиционных услуг. Классифицировать особенности регулирования транспортно-экспедиционной деятельности по видам транспортных средств. Методы: Проведен сравнительный анализ стоимости перевозок контейнерных грузов и затрат времени на транспортировку по ключевым маршрутам. Анализ выполнен с учетом нормативных регламентов, регулирующих железнодорожные перевозки, а также бизнес‑процессов организации, предоставляющей услуги транспортной экспедиции. Результаты: Охарактеризован объект исследования с учетом его позиции в сегменте рынка транспортно‑экспедиционных услуг. Выделены бизнес‑процессы компаний‑экспедиторов и предложено решение по исключению ряда дублирующих функций. Дана сравнительная оценка себестоимости контейнерного состава оператора и экспедитора, позволяющая обосновать интеграцию фитинговых платформ в существующую логистику перевозок. Рассчитан экономический эффект как разница между себестоимостью контейнерного состава оператора и экспедитора. Практическая значимость: Полученные результаты настоящего исследования могут быть внедрены в бизнес-процессы компаний-экспедиторов, что позволит расширить долю рынка в условиях текущей нестабильности, оптимизировать расходы на перевозку, оперативно реагировать на изменения логистики перевозок.

Цель: Определение влияния режимов обработки прямоугольным пятном полупроводникового лазера на изменения глубины зон закалки стали 55, микротвердости, микроструктуры, триботехнических свойств при трении по закаленной стали 45 при подаче масла капельным способом. Методы: Лазерное термоупрочнение поверхности трения образцов стали 55 было выполнено прямоугольным пятном полупроводникового лазера. Определение металлографических свойств зон лазерного упрочнения было выполнено с использованием оптической системы МС-1000, цифрового микроскопа АМ-419, микротвердомера ПМТ-3 с цифровой камерой МС-8,3С при нагрузке 0,98 Н. В качестве эталона был выбран образец стали 18ХГ после цементации с твердостью 56−59 HRC. Триботехнические испытания по схеме: «плоский прямоугольный образец стали 55 — кольцевая поверхность оправки контробразца из стали 45», установленной в патрон шпинделя машины трения. Измерение моментов трения и усилия нагружения образцов было выполнено с применением тензодатчиков в непрерывном режиме с отображением данных на дисплее персонального компьютера. Также на машине трения установлен бесконтактный индуктивный датчик частоты вращения шпинделя с выводом на тахометр, закрепленный на верхней крышке машины. Результаты: Исследования показали, что при лазерном упрочнении микроструктура зон закалки содержит мелкодисперсные иглы мартенсита. Твердость этих зон составляет 7470−10 980 МПа. Давление заедания при различных скоростях скольжения контробразца из стали 45 в 1,5−1,6 раза, а износостойкость — в 2 раза выше, чем у образцов стали 18ХГТ после цементации. При этом коэффициенты трения значительно ниже. Практическая значимость: Технологический процесс изготовления распределительного вала дизеля из стали 18ХГТ с последующей цементацией может быть заменен на лазерную закалку распределительного вала из стали 55 прямоугольным лучом полупроводникового лазера. При этом значительно снижается энергоемкость и повышается экологическая чистота производственного процесса.

Цель: Цель работы заключается в оптимизации метрологического обслуживания динамических весов для железнодорожных вагонов и поездов путем применения современных методов анализа, повышения точности и надежности измерений. В работе изучена методика поверки динамических весов, предложена таблица с графиком поверок, обеспечивающая своевременное и систематическое проведение метрологического обслуживания. Проведен анализ количества динамических весов и станций, на которых они установлены, что позволило оценить масштабы будущих работ. На основе полученных данных разработаны рекомендации по улучшению процессов поверки и калибровки, направленные на снижение погрешностей измерений и повышение эффективности эксплуатации весового оборудования. Результаты работы могут быть использованы для оптимизации работы железнодорожного транспорта и снижения затрат на техническое обслуживание. Методы: Анализ существующей методики поверки динамических весов; разработка нового испытательного состава для поверки весов и моделирование процесса поверки с использованием нового испытательного состава. Результаты: Выявлены недостатки поверки динамических весов; разработан способ поверки испытательным составом. Моделирование показало, что испытательный состав способен существенно сократить время поверки и повысить ее эффективность, снизив нагрузку на логистику локомотивов и железнодорожных составов. Практическая значимость: Предложен новый метод использования испытательного состава для поверки динамических весов на железнодорожных станциях; разработан маршрут курсирования испытательного состава, обеспечивающий поверку всех весов на Октябрьской железной дороге; определены периодичность и порядок проведения поверки весов. Исследование проведено на основе анализа данных поверки динамических весов на железнодорожных станциях Октябрьской железной дороги. Реализация предложенных рекомендаций обеспечит непрерывность работы и снизит затраты на метрологическое обслуживание.

Цель: Обоснование необходимости реорганизации существующего трамвайного движения для возможности реализации высоких расчетных скоростей сообщения, которое является одним из необходимых условий организации скоростных трамвайных линий. Метод: Компьютерное моделирование движения подвижного состава скоростного трамвая с определением математических зависимостей расчетных скоростей сообщения от протяженностей участков между остановочными пунктами с учетом временных задержек на регулируемых пересечениях уличной дорожной сети и времени простоя на остановочных пунктах. Результаты: Получено математическое выражение, позволяющее оценить расчетную скорость сообщения скоростного трамвая при любой протяженности участка между остановочными пунктами. Обоснована необходимость в реорганизации трамвайного движения с созданием необходимых условий, позволяющих реализовать высокие расчетные скорости сообщения. Практическая значимость: Полученные результаты могут применяться инженерами транспортной инфраструктуры при назначении длин и конфигураций участков в процессе проектирования скоростных трамвайных линий.

Цель: Повышение пропускной способности припортовых станций за счет разработки методики взаимодействия припортовых станций и портов. Методы: Для конкретизации работы в сфере контейнерных перевозок рассмотрены лучшие практики и ведущие направления в 2025 г. Проведен анализ цифровых сервисов, используемых в железнодорожной сети. Рассмотрены автоматизированные системы управления в сфере контейнерных перевозок на припортовых станциях и в портах. Выполнена комплексная оценка взаимодействия припортовых станций и портов. Выявлены недостатки существующей технологии их работы. Результаты: Разработана методика взаимодействия припортовых станций и портов, позволяющая сократить простои вагонов с контейнерами на станции, повысить пропускную способность за счет прогнозирования прибытия судна в режиме реального времени и выбора оптимального сценария обработки состава. Составлена концептуальная структура методики взаимодействия припортовых станций и портов, включающая в себя: эмпирические основы и предпосылки, теоретические основы, реализацию и критерии достоверности. Разработан алгоритм к данной методике; рассмотрен пример типовой технологической ситуации с использованием алгоритма методики взаимодействия портов и припортовых станций. Практическая значимость: Методика позволяет обеспечить эффективное и слаженное функционирование портов и припортовых станций, оперативно принимать управленческие решения, повышать конкурентоспособность транспортной отрасли за счет выбора оптимального сценария обработки состава на основе прогноза прибытия судна. Перевозчик обеспечит повышение пропускной способности за счет равномерного распределения вагонов на припортовых станциях, а грузоотправитель — сокращение затрат на плату за занятость инфраструктуры.

Цель: Произвести анализ отказов вагонного оборудования состава проекта «НеВа» по данным электродепо метрополитена «Невское»; обосновать преимущества метода векторного управления двигателями над частотным управлением; выявить импортное оборудование электропоезда «НеВа» и на основе анализа эксплуатационных отказов вагонного оборудования разработать рекомендации по импортозамещению системы управления электропоезда метрополитена «НеВа» для обеспечения бесперебойных и безопасных перевозок пассажиров Петербургского метрополитена; провести сравнительный анализ импортных и отечественных компонентов для реализации системы управления тяговыми двигателями электропоезда метрополитена «НеВа». Методы: Анализ отказов вагонного оборудования состава проекта «НеВа» на основе эксплуатации по данным электродепо метрополитена «Невское». Выявление проблемных узлов на основе анализа отказов вагонного оборудования. Поиск отечественного аналога импортного оборудования. Проведение сравнения характеристик отечественных и импортных микроконтроллеров. Результаты: Обоснованы преимущества метода векторного управления тяговыми двигателями над традиционным методом частотного регулирования. Разработаны рекомендации по выбору отечественных аналогов импортного оборудования системы управления электропоезда метрополитена «НеВа». Практическая значимость: Приведенные отечественные аналоги импортного оборудования позволят организовать бесперебойный процесс эксплуатации электропоездов метрополитена «НеВа», а микроконтроллер К1921ВК01Т может стать основой в вопросе импортозамещения компонентов вагонов «НеВа».

Цель: Разработка математической модели для оптимизации распределения тормозного усилия при потележечном торможении с учетом неоднородного износа тормозных колодок грузовых вагонов, что является одной из основных причин снижения эффективности тормозной системы и безопасности движения. Методы: Проведен анализ недостатков традиционной тормозной рычажной передачи, характеризующейся сложностью регулировки и неравномерным износом колодок. Разработана математическая модель, связывающая износ тормозных колодок с силой торможения, коэффициентом трения, скоростью движения и геометрией рычажной передачи. Модель учитывает динамику смещения центра тяжести колодки при неравномерном износе, что является критическим фактором для предотвращения локальных перегрузок. Проведена параметрическая оптимизация конструкции тормозной системы, включающая корректный подбор длины плеч рычагов и управление давлением в тормозных цилиндрах. Результаты: Предложена система потележечного торможения с тормозными цилиндрами, расположенными непосредственно у колесных пар и оснащенными автоматическими регуляторами выхода штока. Экспериментальные данные показывают, что предложенная система позволяет снизить дисперсию нормальных сил, действующих на поверхности тормозных колодок, по сравнению с традиционной системой. Разработанная модель обеспечивает более равномерный износ колодок и повышает безопасность эксплуатации за счет минимизации риска блокировки колес. Практическая значимость: Полученные результаты позволяют внедрить разработанную модель в проектирование новых и модернизацию существующих тормозных систем грузовых вагонов. Применение предложенной системы потележечного торможения обеспечивает повышение срока службы тормозных колодок и снижение количества аварийных ситуаций, связанных с тормозной системой, что в конечном итоге повышает безопасность движения и снижает эксплуатационные затраты.

Цель: Разработать и обосновать математическую (компьютерную) модель взаимодействия многосекционного трамвайного экипажа с рельсовым путем, предназначенную для анализа поперечной устойчивости (виляния), вертикальной динамики и влияния параметров пути (ширина колеи, подуклонка, неровности и волнообразный износ) на безопасность и комфорт движения. Методы: Описана методика динамического моделирования движения трамвая в программном комплексе «Универсальный механизм» в виде сложной механической системы в постановке с инерционной моделью пути, детализированной шарнирно-силовой схемой экипажа и нелинейным контактом «колесо — рельс». Результаты: Приведены верификационные тесты и адаптация модели по данным натурного эксперимента, подтвердившие сходимость на уровне от 3 до 12,5 % по величине среднеквадратичных ускорений кузова. Результаты исследования подтвердили пригодность модели для обоснования норм по устройству и содержанию трамвайных путей на прямых участках. Практическая значимость: Разработанная модель может быть пригодна для обоснования выбора ширины колеи и подуклонки, допусков отклонений рельсовой колеи в плане и профиле, параметров допускаемого волнообразного износа, а также для оценки допустимых скоростей при заданном состоянии колес и пути. Работа дополняет существующие исследования взаимодействия экипажа и пути на рельсовом транспорте, характеризуя трамвайную кинематику, и демонстрирует воспроизводимую процедуру верификации и адаптации модели на натурных данных.

Цель: Проанализировать различия в жизненном цикле трамвайных стрелок с одним и двумя перьями в ситуациях, где условия использования и установка идентичны. Методы: Проведен анализ объемов основных видов эксплуатационных работ для различных конструкций стрелочных переводов в течение одного эксплуатационного периода при условии соответствия их технического состояния требованиям Правил технической эксплуатации. Результаты: Установлено, что двухперьевой стрелочный перевод требует меньшего объема обслуживающих работ по сравнению с одноперьевым в течение одного и того же периода наблюдения, даже при более высокой грузонапряженности на его участке. Практическая значимость: Учитывая широкую распространенность одноперьевых стрелочных переводов на трамвайных путях Санкт‑Петербурга и других городов, оценка экономической целесообразности их содержания определяет стоимость жизненного цикла. Это позволяет обоснованно выбирать тип стрелочного перевода при проектировании и эксплуатации трамвайных путей.

Цель: Повышение надежности работы контактной сети и снижение эксплуатационных затрат за счет выявления обледенения контактного провода. Рассматривается метод обнаружения наледи, основанный на регистрации тепловых эффектов, сопровождающих фазовый переход воды из твердого состояния в жидкое и обратный ему. Методы: Методология базируется на теплофизическом анализе параметров данного процесса. Предложен специализированный модуль, расположенный на контактном проводе с двумя температурными датчиками и двумя разнесенными электрическими нагревателями, работающими в асинхронном режиме. Методика измерения включает вычисление разности температур между двумя удаленными друг от друга участками контактного провода и последующий анализ длительности фазового перехода воды из твердого в жидкое состояние для определения наличия наледи и измерения ее толщины. В статье приведены: конструктивная особенность и принцип работы специализированного модуля, методика определения и измерения толщины льда на основе анализа тепловых характеристик, математическая модель, сравнительный анализ эффективности предложенного решения с традиционными методами борьбы с обледенением. Результаты: Подтверждено, что при образовании льда формируется характерное температурное «плато» и наблюдается обнуление разности температур, что позволяет точно диагностировать обледенение и количественно оценить толщину наледи. Методика, основанная на анализе теплового процесса, принципиально нечувствительна к таким внешним факторам, как ветер и осадки, и высокочувствительна к наличию даже тонкого ледового отложения. Практическая значимость: Исследование подтверждает возможность оперативного и точного выявления наледи на проводе контактной сети, включая измерение ее толщины, с автоматической передачей данных в диспетчерскую систему. Предложенное решение может быть интегрировано в существующие системы антиобледенения, а также использовано при проектировании новых участков контактной сети.

Цель: Установить, какие материалы наиболее перспективны для создания кузовов поездов ВСТ, и выбрать оптимальные способы сварки для выполнения их сборки. Методы: Анализ свойств применяемых и перспективных металлов, используемых при производстве кузовов скоростных поездов ведущими производителями подвижного состава в Европе, Японии и Китае. Результаты: Для создания кузовов ВСТ наиболее широко применяются конструкции из нержавеющей стали и алюминиевых сплавов, соединяемые различными методами сварки. Сделан вывод, что в настоящее время лазерная сварка является наиболее технологичным методом благодаря высокой степени автоматизации и превосходному качеству получаемых сварных соединений. Практическая значимость: Рекомендации могут быть использованы конструкторами и вагоностроителями для создания и постройки первого российского высокоскоростного поезда «Белый кречет».

Цель: Обосновать способ повышения надежности и экономической эффективности дефицитной системы электроснабжения города Тартуса за счет внедрения распределенной газотурбинной генерации. Методы: Включают аналитический расчет коэффициента готовности по ГОСТ Р 27.002—2009 для трех сценариев энергоснабжения (только внешняя сеть, изолированная и параллельная работа распределенной генерации (РГ)); моделирование нормальных и аварийных режимов в PowerFactory и RastrWin3 с оценкой потерь мощности, отклонений напряжения и частоты; технико‑экономический анализ проекта газотурбинного энергоцентра (18 МВт) методом чистого дисконтированного дохода. Результаты: Показывают, что интеграция распределенной генерации не снижает надежность: общий коэффициент готовности системы достигает 0,999, что сопоставимо с базовым вариантом и превышает нормативные требования. В автономном режиме отклонение напряжения остается в пределах ±5 %, частоты — ±0,2 Гц. Экономический расчет выявил срок окупаемости инвестиций около 9 лет при условной себестоимости генерации порядка 5 руб/кВт · ч. Практическая значимость: Заключается в предложении оптимальной конфигурации газотурбинной распределенной генерации и схемы ее подключения (20 кВ, двухцепные линии 2 × 300 мм2), обеспечивающих повышение устойчивости электроснабжения критически важных потребителей города и сокращение зависимости от внешней энергосистемы. Результаты исследования могут служить методической основой для модернизации энергосистем в других регионах, испытывающих аналогичный дефицит мощности.

Цель: Цель настоящей работы заключается в создании эффективной системы защиты контактной сети наземного городского электрического транспорта от малых токов короткого замыкания, возникающих преимущественно в местах пересечений путей и при нарушениях правил эксплуатации подвижного состава. Несмотря на наличие существующих методов защиты, такие аварии часто приводят к серьезным последствиям — полному выходу из строя отдельных участков сети и остановке пассажирского движения. Методы: Методы исследования включают анализ действующих систем защиты питающих линий, выявление недостатков существующей схемы защиты, а также разработку нового алгоритма распознавания аварийных ситуаций, вызванных маломощными короткими замыканиями. Результаты: Полученные промежуточные результаты экспериментальной эксплуатации показывают перспективность дальнейших исследований в области малых токов короткого замыкания. Внедрение быстродействующих систем регистрации аварийных процессов позволяет эффективно обнаруживать и устранять угрозы, возникающие при небольших значениях токов короткого замыкания. Проведение дальнейших испытаний запланировано на последующие годы, итоговая задача состоит в полной автоматизации процесса выявления и предотвращения аварийных режимов контактной сети, связанных с малыми токами короткого замыкания. Практическая значимость: Практическое значение работы определяется возможностью значительно повысить надежность электроснабжения городских транспортных сетей, снизить частоту вынужденных простоев общественного транспорта и минимизировать риски безопасности пассажиров. Результаты исследования имеют потенциал широкого внедрения в практику эксплуатационных служб предприятий городского электротранспорта, обеспечивая стабильную работу инфраструктуры и повышение качества обслуживания населения.

Цель: Заключается в анализе, выявлении и учете всех затрат, связанных с непроизводительным простоем вагонов при взаимодействии железнодорожного и морского видов транспорта. На уровне припортовой станции-порта особенно актуальны вопросы технологии взаимодействия при передаче грузопотока. Выбор технологического варианта передачи грузопотока в условиях ограниченности ресурсов железнодорожной инфраструктуры и тягового подвижного состава должен быть экономически обоснован. Прямой вариант перегрузки груза с одного вида транспорта на другой увеличивает риски непроизводительного простоя вагонов, так как технологически и организационно сложно одновременно подготовить судно и подать вагоны под грузовые операции. Целесообразно выявить и учесть все затраты, связанные с возможными непроизводительными простоями вагонов. Методы: Анализ, синтез, формализация. Результаты: Было установлено, что базовые ставки по «Тарифному руководству № 2» не учитывают всех расходов на непроизводительный простой вагонов. Получены различные значения стоимости непроизводительного простоя для ОАО «РЖД» и операторской компании для двух вариантов маневрового обслуживания, учитывающих разную стоимость локомотиво-часа маневровой работы. Построены диаграммы детализации затрат на непроизводительный простой вагонов по различным категориям. Обосновано технологическое решение перегрузки груза при взаимодействии железнодорожного и морского транспорта с использованием терминала. Практическая значимость: Результаты работы имеют практическое значение для организации работы на припортовых станциях и в железнодорожных районах порта ОАО «РЖД» и операторских компаний. Выявлены скрытые затраты при непроизводительном простое вагонов для ОАО «РЖД» и операторских компаний при двух вариантах маневрового обслуживания.

Цель: Исследование посвящено построению и численной верификации пространственной модели рессорного подвешивания маневрового локомотива ТЭМ2, реализованной в программном комплексе «Универсальный механизм». На фоне износа подвижного состава, эксплуатируемого сверх нормативного срока службы, возрастает значимость точных инженерных методов оценки динамической нагруженности. Методы: В работе представлено моделирование взаимодействия тележки и кузова локомотива при прохождении искусственно сгенерированных неровностей пути, сопровождаемое сравнительным анализом с экспериментальными данными. Результаты: Оценка динамических параметров, таких как деформации концевых пружин, коэффициенты вертикальной динамики и рамные силы, продемонстрировала отклонения, не превышающие 15 %, что подтверждает адекватность разработанной модели. Отмечено, что наиболее точные совпадения зафиксированы в диапазоне скоростей 60–80 км/ч. Практическая значимость: Результаты могут быть использованы как основа при дальнейшем расчете остаточного ресурса, а также при уточнении методик для оценок динамических характеристик.
Статистика статьи
Статистика просмотров за 2026 год.
Издательство
- Издательство
- ИЗДАТЕЛЬСКИЙ ЦЕНТР РИОР
- Регион
- Россия, Москва
- Почтовый адрес
- 127282, г Москва, р-н Северное Медведково, ул Полярная, д 31В стр 1
- Юр. адрес
- 127282, г Москва, р-н Северное Медведково, ул Полярная, д 31В стр 1
- ФИО
- Сафонов Михаил Николаевич (генеральный директор)
- E-mail адрес
- znanium@gmail.com
- Контактный телефон
- +7 (499) 3505481