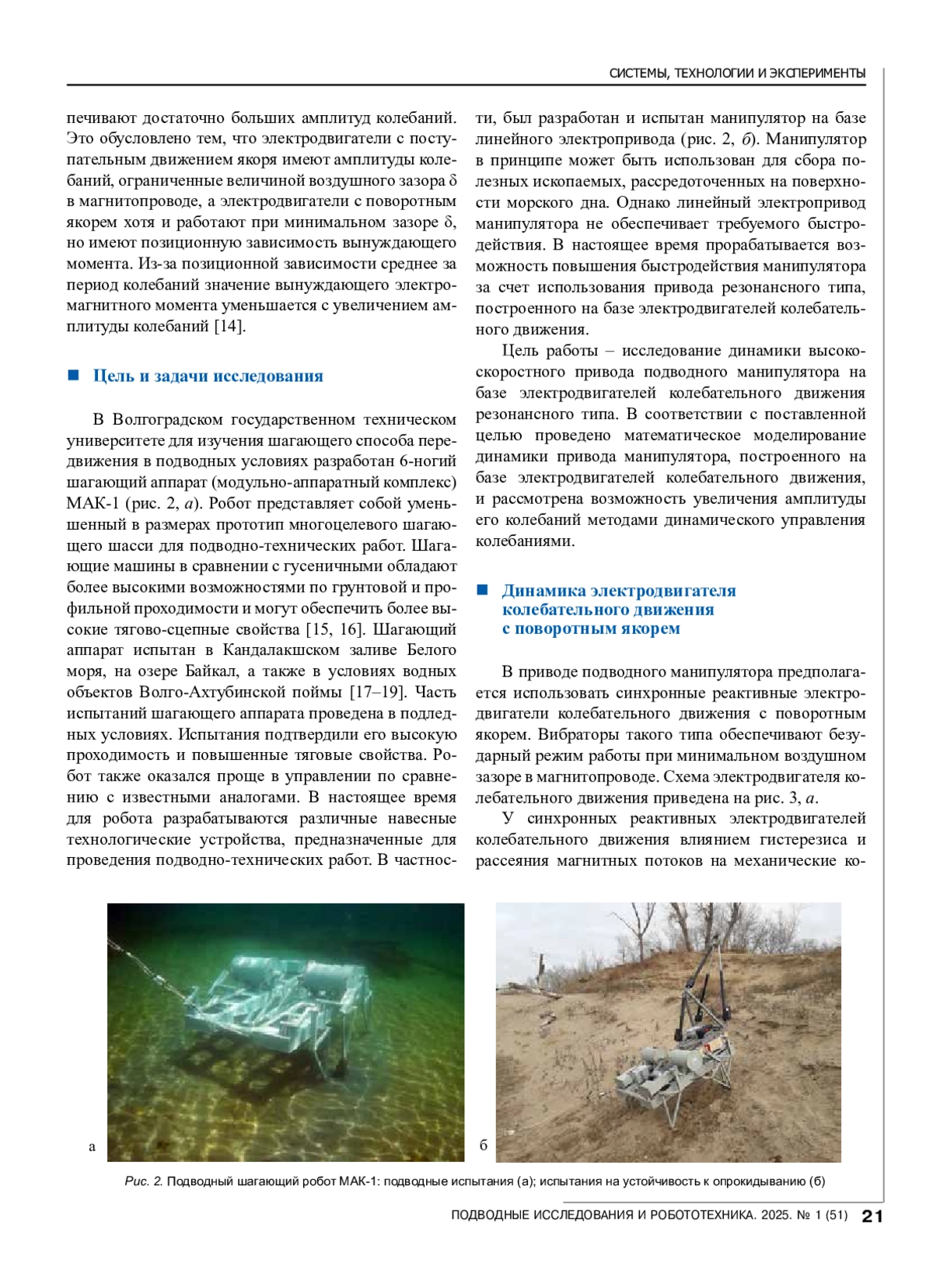
В настоящее время находят применение технологии освоения минеральных ресурсов Мирового океана с помощью роботизированных добычных систем, передвигающихся по дну. Подводные манипуляторы могут использоваться для сбора рассредоточенных по морскому дну твердых полезных ископаемых. Для эффективной работы необходимы высокоскоростные манипуляторы. В манипуляторах скорость звеньев ограничена высокими энергозатратами на преодоление сил инерции в каждом цикле движения. Цель работы – исследование динамики высокоскоростного манипулятора на базе электродвигателей колебательного движения резонансного типа. Резонансная настройка обеспечивает рекуперацию энергии, затраченной на преодоление сил инерции. В глубоководных условиях электрическая часть такого вибропривода может быть легко изолирована от внешней среды. Проведено моделирование динамики привода манипулятора, построенного на базе электродвигателей колебательного движения с поворотным якорем. При разработке математической модели привода использовались уравнения Лагранжа–Максвелла. Моделирование показало, что из-за позиционной зависимости электромагнитного вынуждающего момента рассматриваемые электродвигатели не могут обеспечить достаточно больших амплитуд колебаний. Рассмотрена возможность усиления колебаний методами динамического управления. Показано, что усиления колебаний можно достичь путем введения дополнительной степени свободы в электромеханическую систему «электродвигатель – исполнительный механизм». Предлагается связать схват манипулятора с якорем электродвигателя посредством упругого элемента, образующего вместе с массой схвата инерционный динамический гаситель колебаний якоря. За счет динамического гашения происходит перераспределение колебательной энергии от якоря к исполнительному механизму. В результате амплитуда колебаний схвата возрастает, а амплитуда колебаний якоря, наоборот, стремится к нулю. Причем можно добиться динамической стабилизации колебаний якоря в зоне с максимальными значениями позиционной зависимости вынуждающего электромагнитного момента. Численное моделирование показало, что таким способом можно в десятки раз увеличить амплитуду колебаний исполнительного механизма.
Предпросмотр статьи

Идентификаторы и классификаторы
- SCI
- Электротехника
Если у вас возникли вопросы или появились предложения по содержанию статьи, пожалуйста, направляйте их в рамках данной темы.