Темой исследования является разработка системы управления для автономного судна с использованием операционной системы Robot Operation System 2.
Отмечается, что автономные суда являются перспективным классом робототехнических систем, предназначенных для выполнения различных задач в морской среде, включая мониторинг акваторий, научные исследования, поисково-спасательные и транспортные операции. Их ключевыми преимуществами являются автономность, гибкость применения и возможность работы в условиях, представляющих угрозу для человека.
В работе рассмотрено использование современной операционной системы Robot Operation System 2 для робототехники, обеспечивающей модульность, масштабируемость и высокую степень распределенности вычислений.
Отмечается, что данный вид программного обеспечения предоставляет готовые алгоритмы для навигации, обработки данных сенсоров и управления движением, а также инструменты для тестирования, отладки и визуализации данных, что ускоряет процесс разработки и повышает надежность системы.
В рамках исследования разработана структурная схема системы управления автономного судна, включающая подсистемы навигации, технического зрения, управления движением и взаимодействия с оператором через береговой пульт, на которой показаны состав и взаимодействие отдельных узлов операционной системы.
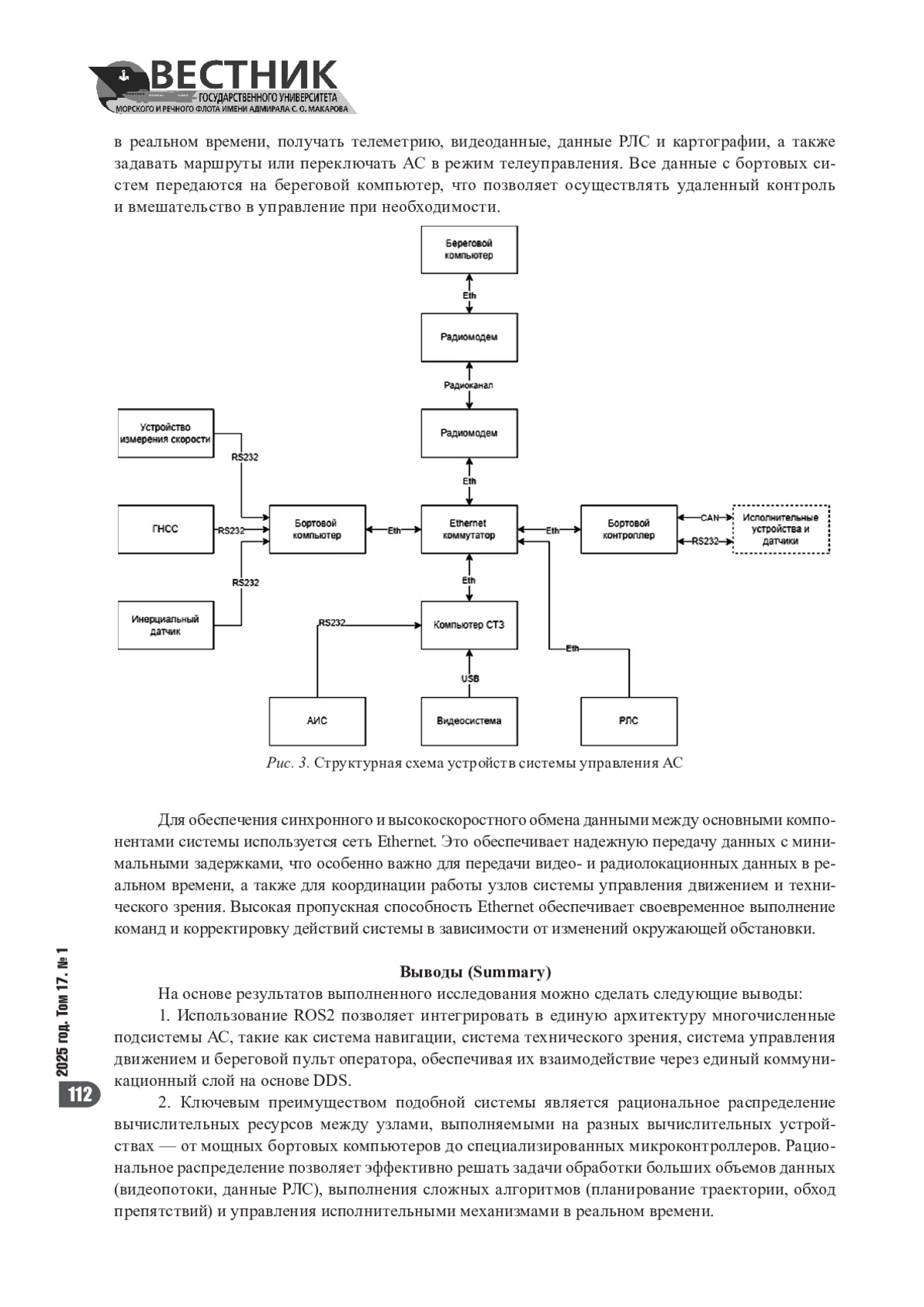
Представлена схема устройств, обеспечивающая распределение вычислительных ресурсов между узлами. Предложенная система управления демонстрирует возможность объединения различных подсистем автоматических судов в общую систему на основе единой логики взаимодействия и обмена данными операционной системы Robot Operation System 2.
Применение данной операционной системы позволяет повысить скорость разработки, улучшить надежность программного обеспечения, упростить интеграцию сложных алгоритмов и обеспечить гибкость системы для дальнейших усовершенствований.
Предпросмотр статьи

Идентификаторы и классификаторы
Если у вас возникли вопросы или появились предложения по содержанию статьи, пожалуйста, направляйте их в рамках данной темы.