

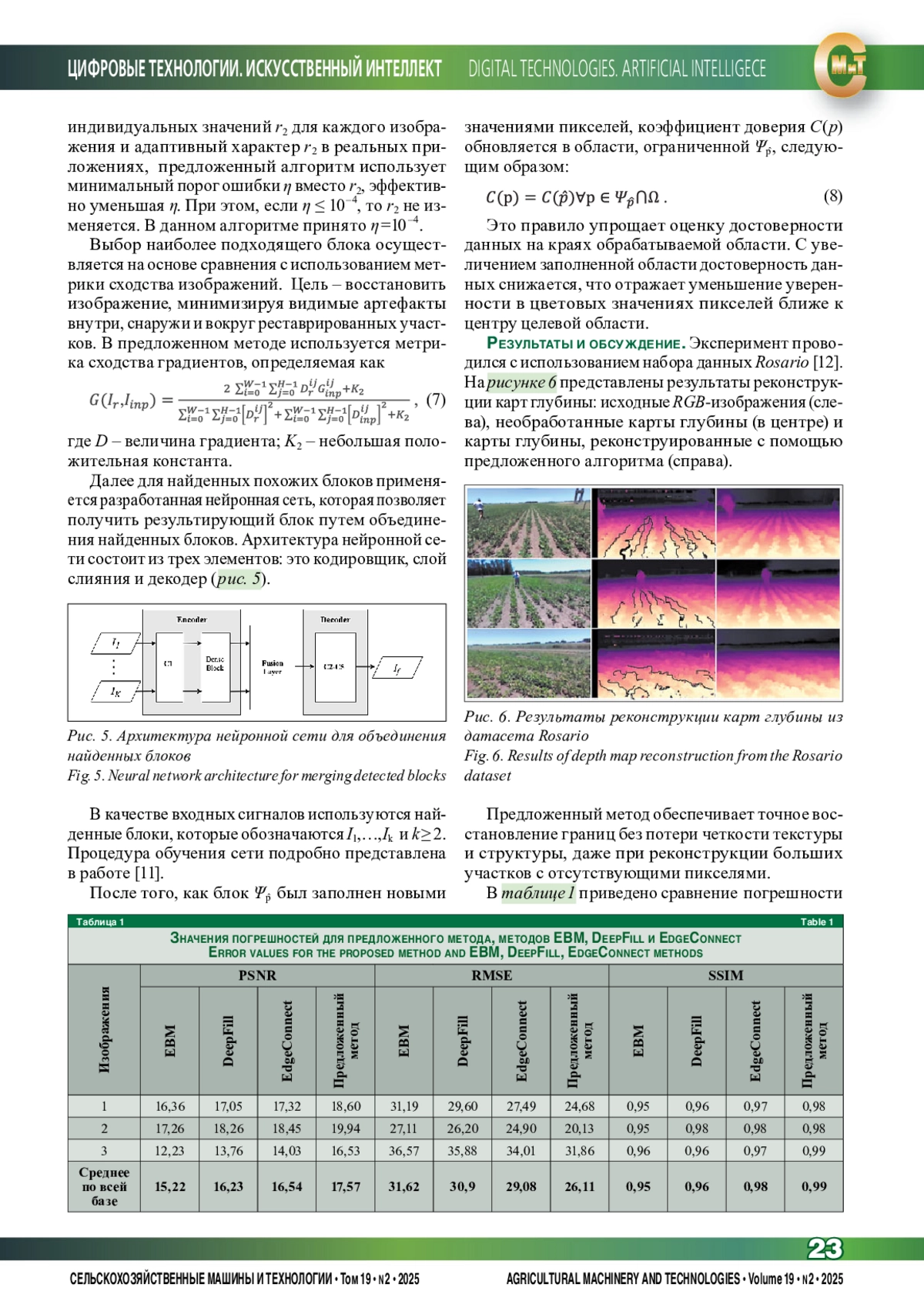
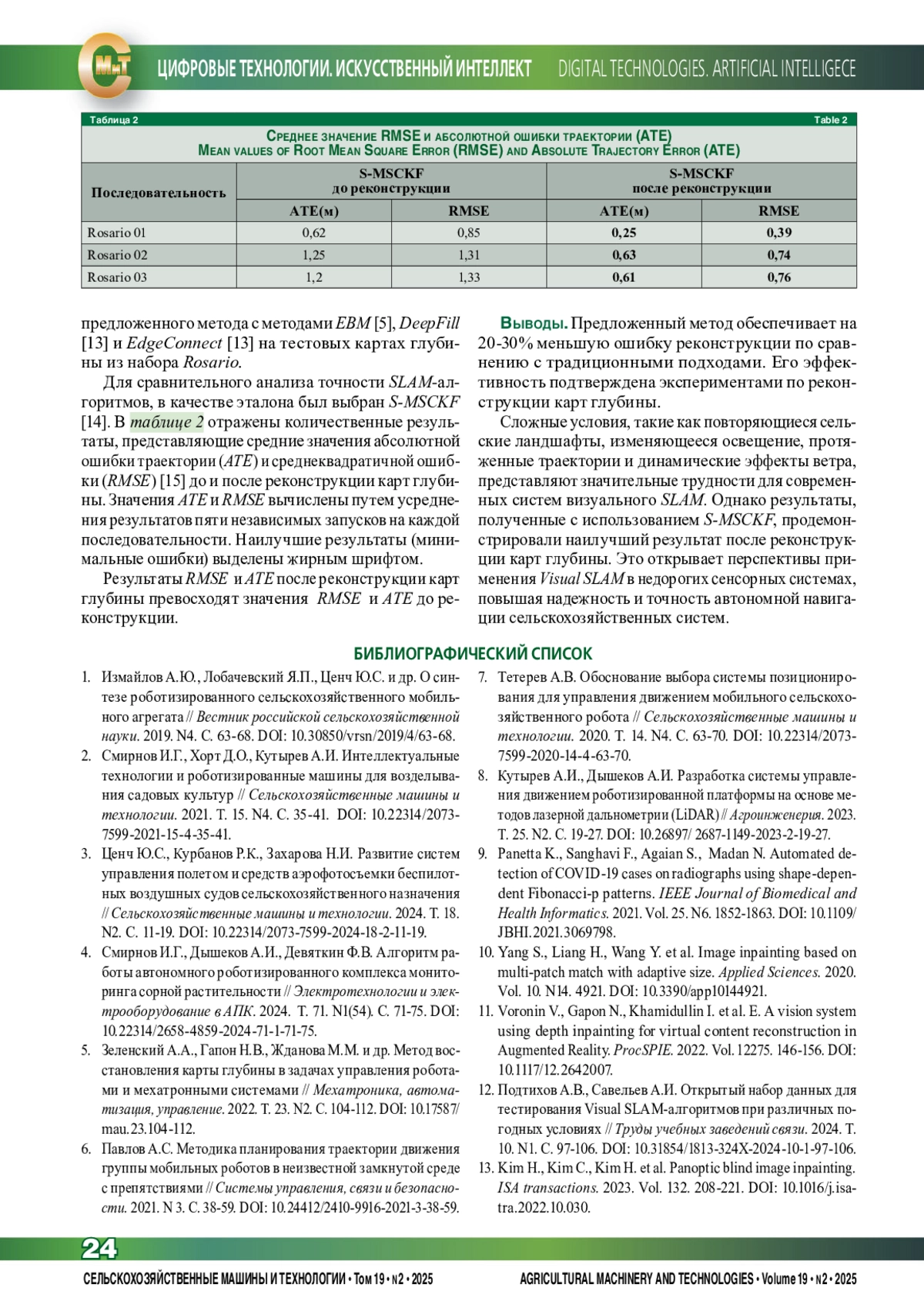
Предложен новый метод реконструкции для восстановления потерянных областей на картах глубины для повышения точности автономной навигации сельскохозяйственных РТК. (Цель исследованая) Разработка метода, который устраняет потери данных на картах глубины, улучшая тем самым работу системы одновременной локализации и картографирования (SLAM). (Материалы и методы) Оригинальный метод реконструкции карт глубины включает: вычисление анизотропного градиента; поиск аналогичных блоков на основании нового критерия; объединение найденных блоков с помощью нейросетевой архитектуры, состоящей из кодировщика, слоя слияния и декодера. Метод протестирован на наборе данных Rosario, в том числе со сложными сценариями сельского хозяйства. (Результаты и обсуждение) Реконструкция карт глубины показала значительное улучшение качества: средняя ошибка (RMSE) пикового отношения сигнала к шуму (PSNR) и индекса структурного сходства (SSIM) уменьшилась на 20−30% по сравнению с существующими методами. Показано, что предлагаемый метод сохраняет структуру и текстуру восстановленных областей, обеспечивая точную реконструкцию крупных зон с отсутствующими пикселями. Чтобы сравнить производительность SLAM, была выбрана S-MSCKF. Количественные результаты абсолютной ошибки траектории (ATE) и среднее значение RMSE оценены с помощью SLAM до и после восстановления карт глубины. Абсолютная ошибка траектории (ATE) снизилась с 0,62 до 0,25 метра, а RMSE – с 0,85 до 0,39 метра. (Выводы) Предлагаемый метод значительно повышает точность работы систем SLAM, особенно в условиях сложных сельских ландшафтов, изменчивого освещения и длительных перемещений. Отмечен потенциал для широкого внедрения метода в системах автономного управления сельскохозяйственной техникой при увеличении надежности и безопасности эксплуатации роботов.
Предпросмотр статьи




Идентификаторы и классификаторы
- SCI
- Машиностроение
Если у вас возникли вопросы или появились предложения по содержанию статьи, пожалуйста, направляйте их в рамках данной темы.










