
В статье рассматривается процедура синтеза регулятора для системы управления линейным перемеще-нием тележки с установленным на ней перевернутым маятником. Синтез выполняется с использованием коэффициентного метода. Приведены соотношения, необходимые для расчета параметров регулятора для идеализированного случая, а также для случая, когда структура системы и ее параметры близки к реаль-ным. Приведены численные примеры расчета регуляторов для конкретных систем и результаты математического моделирования их работы, подтверждающие высокую эффективность полученных регуляторов.
Предпросмотр статьи


Идентификаторы и классификаторы
- eLIBRARY ID
- 87345997
Для цитирования:
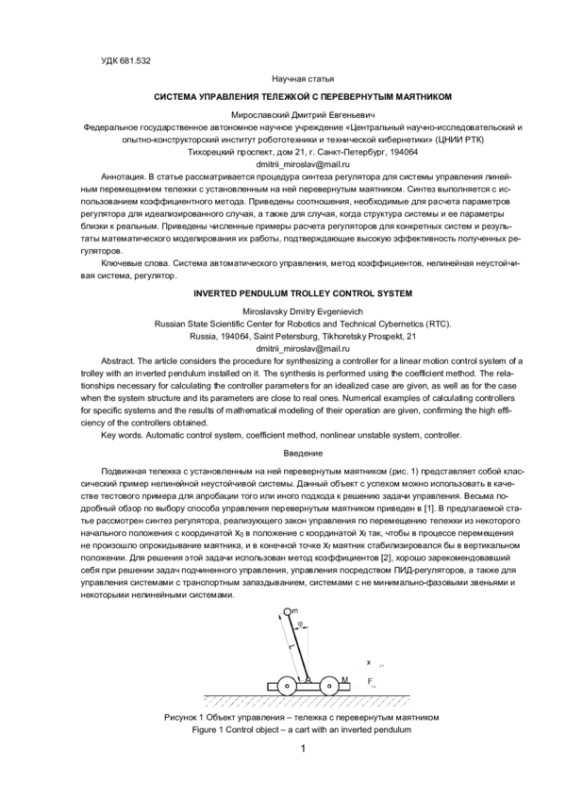
МИРОСЛАВСКИЙ Д. Е. СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕЖКОЙ С ПЕРЕВЕРНУТЫМ МАЯТНИКОМ // РОБОТОТЕХНИКА И ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА
Будьте первым, кто начнет обсуждение
Если у вас возникли вопросы или появились предложения по содержанию статьи, пожалуйста, направляйте их в рамках данной темы.