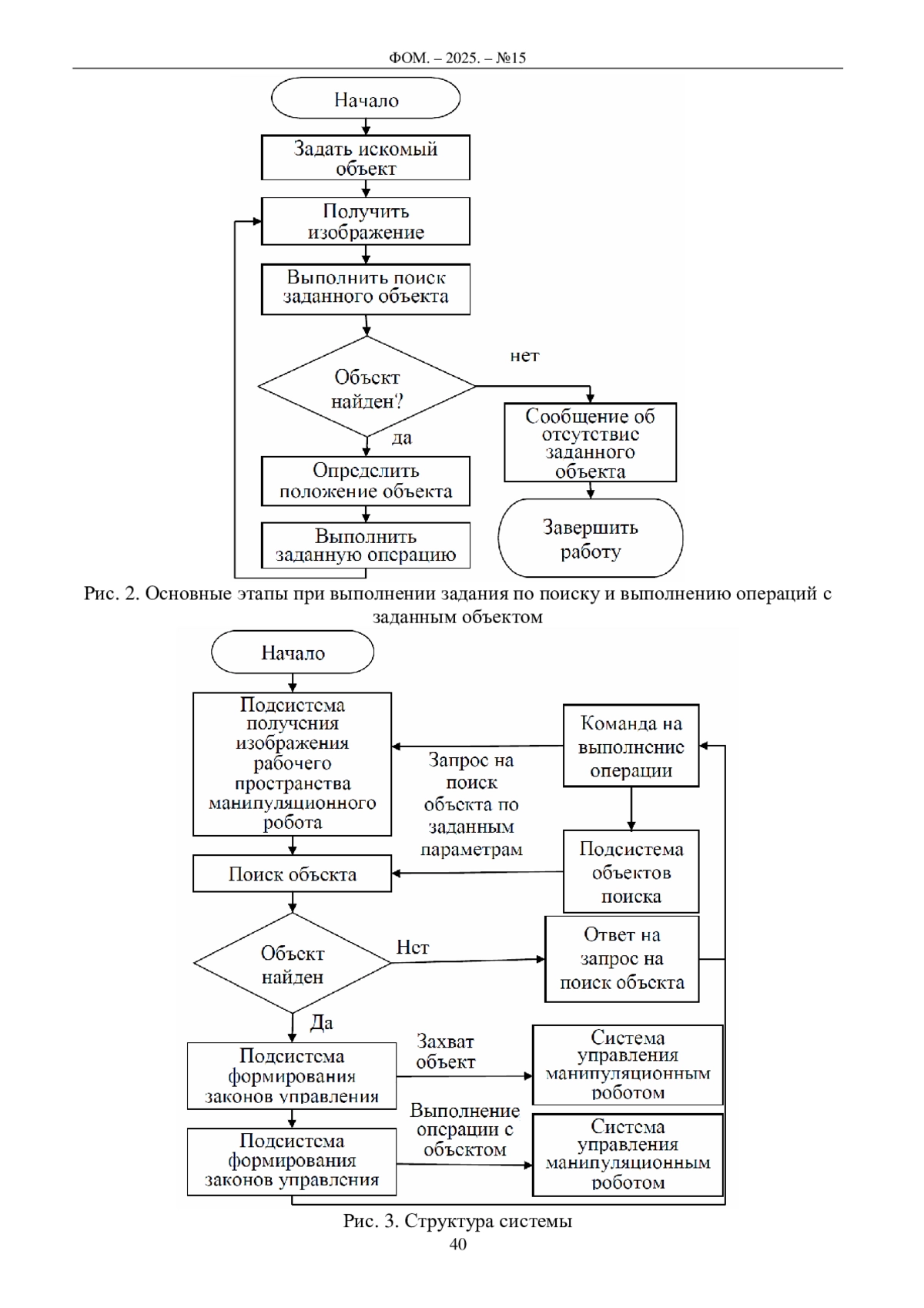
Манипуляционные роботы широко применяются для перемещения предметов производства, а также выполнения различных технологических операций. Перемещения выполняются в контейнеры или в специализированные устройства для дальнейшей обработки. Так как положение объектов и количество заранее не известны, то для получения информации о внешней среде используется видеокамера. Для задания объектов, с которыми предстоит оперировать, используются заранее подготовленные шаблоны. Для выполнения поиска реализован ряд методов. В результате поиска определяются координаты объектов, соответствующих заданному шаблону. Это позволяет подготовить систему команд для манипуляционного робота по захвату найденного объекта и выполнения с ним необходимых операций.
Предпросмотр статьи
Идентификаторы и классификаторы
Если у вас возникли вопросы или появились предложения по содержанию статьи, пожалуйста, направляйте их в рамках данной темы.