

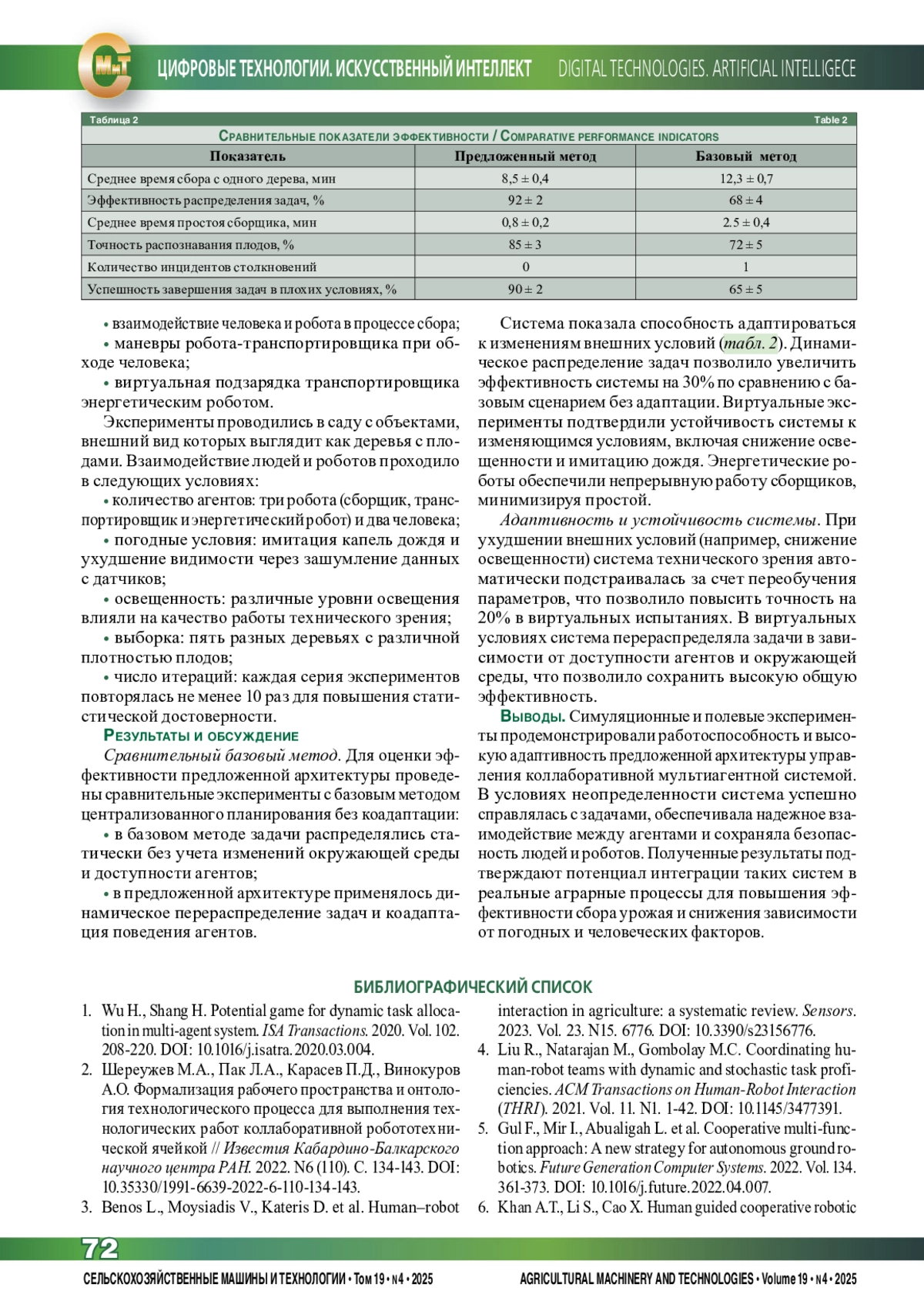
Коллаборативная робототехника в сельском хозяйстве ориентирована на автоматизацию трудоемких процессов. Коллаборативные мультиагентные робототехнические системы (КМРТС), в отличие от традиционных автономных систем, предполагают активное взаимодействие между роботами и операторами-людьми, что требует разработки новых методов координации, адаптации и обеспечения безопасности в условиях неопределенности и динамично изменяющейся среды. (Цель исследования) Разработка теоретических и прикладных подходов к моделированию поведения и управлению коллаборативными мультиагентными робототехническими системами, направленных на обеспечение эффективного распределения задач, координации действий агентов и их безопасного взаимодействия с людьми при выполнении операций по сбору урожая плодовой продукции. (Материалы и методы) Для достижения поставленных целей использовались методы теории игр, машинного обучения и управления с учетом рисков. Построена математическая модель, описывающая взаимодействие агентов с учетом вероятностной природы среды и наличия оператора. Валидация предложенных решений осуществлялась посредством численного моделирования, а также на основе данных, которые получены в условиях экспериментального полигона, имитирующего реальные сельскохозяйственные сценарии. (Результаты и обсуждение) Разработаны алгоритмы координации, адаптации и перераспределения задач между агентами коллаборативной мультиагентной робототехнической системой, обеспечивающие устойчивость к ошибкам сенсорного восприятия, задержкам передачи данных и внешним возмущениям, характерным для сельскохозяйственной среды. Особое внимание уделено адаптации поведения агентов в ответ на действия операторов-людей, включая возможность приоритизации задач и контекстно-зависимого изменения стратегии взаимодействия. Симуляционные эксперименты продемонстрировали повышение производительности системы за счет более равномерного распределения нагрузки между роботами, уменьшения числа конфликтов при выполнении совместных задач и сокращения простоев. Также зафиксировано улучшение показателей безопасности, в частности, снижение вероятности столкновений и некорректных реакций на присутствие человека в рабочей зоне. (Выводы) Разработанные модели и алгоритмы могут быть использованы для построения интеллектуальных коллаборативных мультиагентных робототехнических систем, способных к адаптивному и безопасному взаимодействию в условиях сельскохозяйственного производства, что способствует росту эффективности автоматизированного сбора урожая и снижению зависимости от человеческого труда.
Предпросмотр статьи




Идентификаторы и классификаторы
- SCI
- Информатика
Если у вас возникли вопросы или появились предложения по содержанию статьи, пожалуйста, направляйте их в рамках данной темы.










