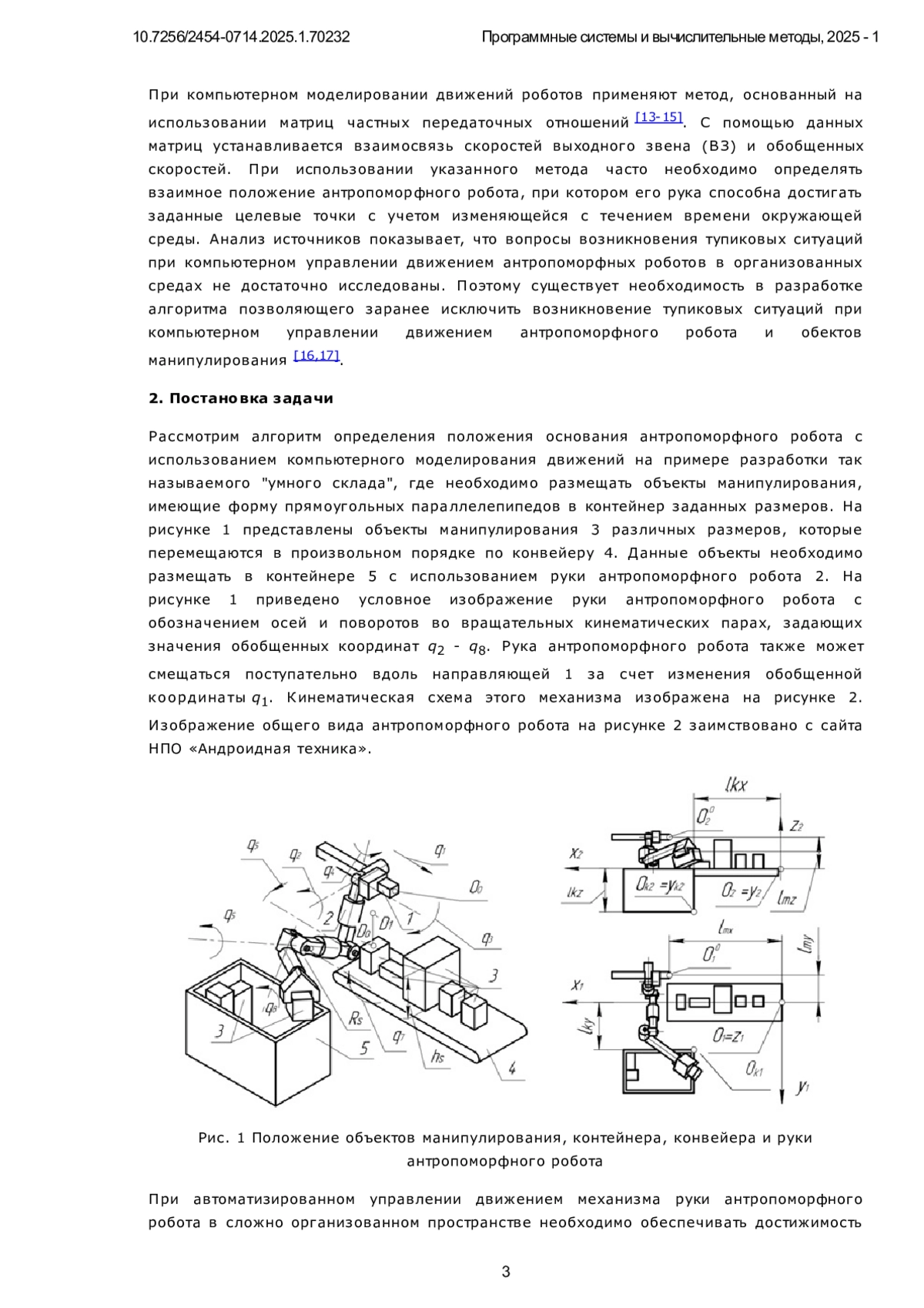
Предметом исследования является использование интеллектуальной системы управления движением руки антропоморфного робота при выполнении операций размещения объектов манипулирования в контейнер заданных размеров. Объектом исследования является процесс определения параметров относительного положения основания руки по отношению к объектам манипулирования и контейнера, при которых возможно выполнение двигательных заданий. Автор подробно рассматривает алгоритм определения положения основания руки антропоморфного робота c использованием синтеза движений по вектору скоростей при решении задачи установки объектов манипулирования заданных, в виде прямоугольных призм в контейнер. Особое внимание в статье уделяется методике определения центра системы координат, связанного с основанием робота в неподвижном пространстве и вычисления целевых точек, в которые перемещается центр выходного звена при различных положениях ранее установленных в контейнер объектов манипулирования. Суть метода состоит в использовании компьютерного моделирования движения антропоморфного робота с использованием синтеза движений по вектору скоростей с оценкой взаимного положения механизма руки и запретных зон. В качестве запретных зон выступают установленные ранее объекты манипулирования располагающихся внутри контейнера и боковые стенки самого контейнера. Основными выводами представленного исследования является возможность использования разработанного алгоритма для проверки синтеза движений руки при заданных геометрических параметрах, задающих положение антропоморфного робота, конвейера и контейнера, при которых отсутствует возникновение тупиковых ситуаций. Новизна исследования состоит в разработке метода, основанного на итерационном поиске значений параметров взаимного положения основания руки, конвейера и контейнера на каждой итерации при возникновении тупиковых ситуаций. Представлены результаты расчетов положения основания руки робота и промежуточных конфигураций, построенных с использованием компьютерного моделирования движений на основе использования разработанного алгоритма. Проведенные исследования могут быть использованы при разработке информационно-управляющих комплексов подвижных объектов, в частности при разработке интеллектуальных систем управления автономно функционирующих антропоморфных роботов в организованных средах.
Предпросмотр статьи
Идентификаторы и классификаторы
Если у вас возникли вопросы или появились предложения по содержанию статьи, пожалуйста, направляйте их в рамках данной темы.