
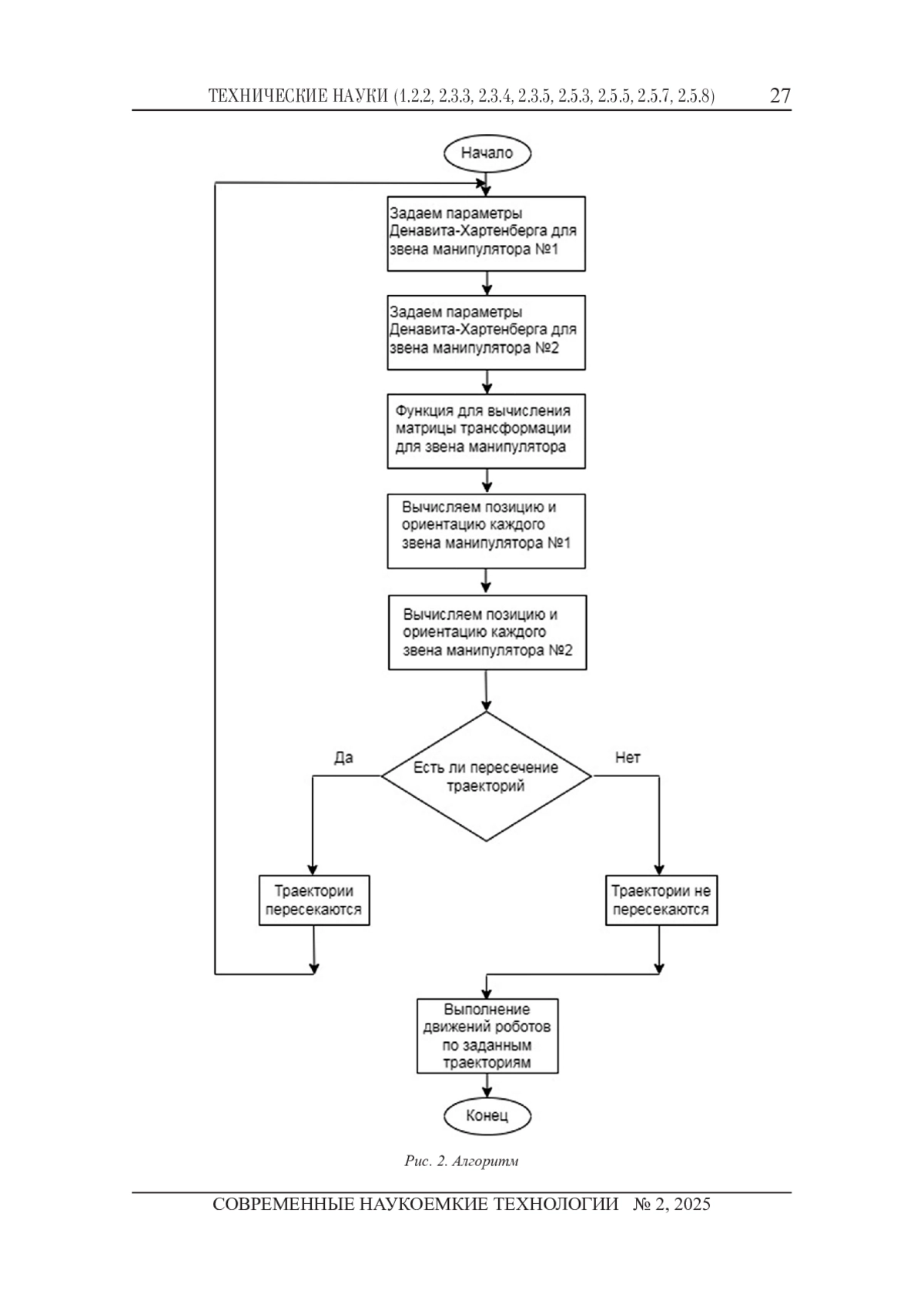
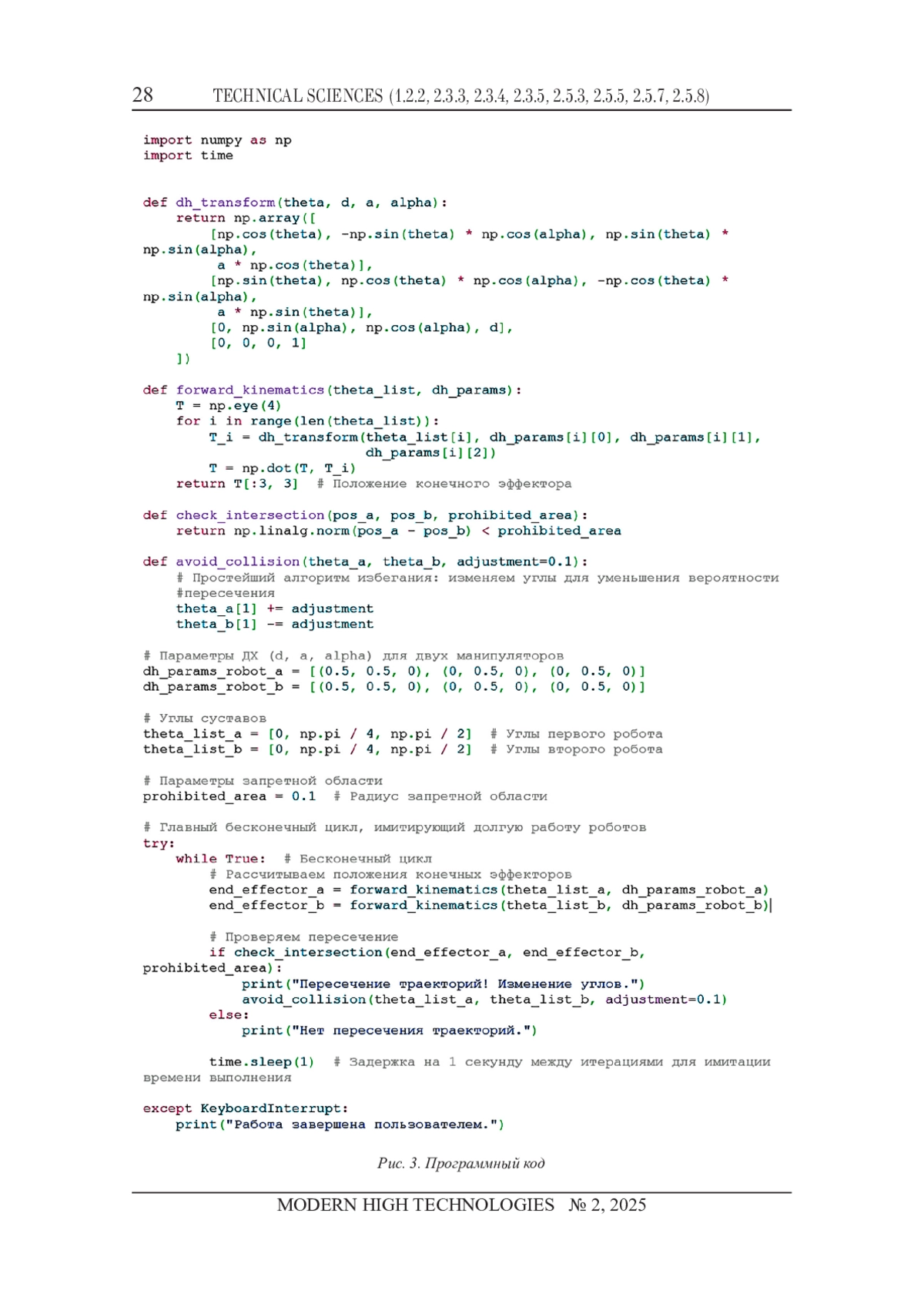
Цель исследования - повышение гибкости производственного процесса за счет сокращения аварий и повышения скорости совместной работы роботов-манипуляторов. В работе предложено обеспечивать совместную безаварийную работу роботов-манипуляторов на основе расчета координат возможного пересечения траекторий движения их звеньев в процессе совместного выполнения различных технологических операций в одной рабочей зоне на гибком производстве. Отметим, что предложенный подход сокращает время технологического цикла для изготовления одного изделия не за счет остановки роботов-манипуляторов с последующим возобновлением их работы, а за счет своевременной корректировки их траектории. Данная постановка задачи является критически важной, потому что ее реализация обеспечит слаженную работу движущегося оборудования - одновременное выполнение технологических операций роботами-манипуляторами в общей рабочей зоне при непосредственной близости друг от друга с соблюдением безопасности. Актуальность исследования обусловлена непрерывно возрастающей потребностью в автоматизации производственных процессов, в том числе с применением роботов-манипуляторов. Повышение технологической гибкости производства можно обеспечить за счет перехода от индивидуальной работы роботов-манипуляторов к их совместному взаимодействию в общей рабочей зоне для различных технологических задач производственной деятельности. Для решения поставленной задачи - нахождения координат пересечения траекторий перемещения звеньев роботов-манипуляторов и дальнейшего расчета безопасных траекторий перемещений использован метод Денавита - Хартенберга, позволивший решить с помощью программного вычисления задачу совместного безаварийного взаимодействия роботов-манипуляторов в общей рабочей зоне.
Предпросмотр статьи
Идентификаторы и классификаторы
Робот-манипулятор достаточно универсален благодаря [1; 2; 3, c. 54] возможности замены рабочего органа в зависимости от поставленной задачи для выполнения различного типа операций и наличию устройства для программного управления выполнением технологических операций согласно разработанному алгоритму программного кода.
Если у вас возникли вопросы или появились предложения по содержанию статьи, пожалуйста, направляйте их в рамках данной темы.
Список литературы
1. Бойков В.И., Рудаков Р.В., Сержантова М.В. Идентификация n-звенных робототехнических манипуляторов // Международный научно-исследовательский журнал. 2024. № 1(139). URL: https://research-journal.org/archive/1-139-2024-january/ (дата обращения: 04.02.2025). DOI: 10.23670/IRJ.2024.139.166 EDN: FEHNZJ
2. Рудаков Р.В., Бойков В.И., Бушуев А.Б., Быстров С.В., Литвинов Ю.В., Нуйя О.С., Сержантова М.В. Адаптивное управление роботами для работы в условиях действия высоких температур // Информационно-управляющие системы. 2024 № 4. С. 12-23. DOI: 10.31799/1684-8853-2024-4-12-23 EDN: SMXJVV
3. Булгаков А.Г., Воробьев В.А. Промышленные роботы. Кинематика, динамика, контроль и управление. М.: СОЛОН-Пресс, 2018. 484 с.
4. Дунаева Е.С. Специфика применения роботов-манипуляторов в производстве // Актуальные вопросы современной экономики. 2021. № 10. С. 50-55. DOI: 10.34755/IROK.2021.42.87.007 EDN: DNECFB
5. Xu P., Zheng J., Zhang J., Zhang K., Cui Y., Tang Q. Distributed position-force control for cooperative transportation with multiple mobile manipulators // Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics). 2021. Vol. 12690 LNCS. P. 111-118. DOI: 10.1109/TCST.2017.2720673
6. Козлов В.В., Макарычев В.П., Тимофеев А.В., Юревич Е.И. Динамика управления роботами. М.: Наука. Главная редакция физико-математической литературы, 1984. 336 с.
7. Тачков А.А., Козов А.В., Яковлев Д.С., Бузлов Н.А., Курочкин С.Ю. Принципы построения систем автономного управления движением наземных робототехнических комплексов специального назначения // Робототехника и техническая кибернетика. 2022. № 10 (2). С. 121-132. DOI: 10.31776/RTCJ.10205 EDN: WKACSL
8. Spong M.W., Hutchinson S., Vidyasagar M. Robot modeling and control. John Wiley & Sons, 2020. 608 с.
9. Kantaros Y., Guo M., Zavlanos M. Temporal logic task planning and intermittent connectivity control of mobile robot networks // IIEEE Transactions on Automatic Control. 2019. Vol. 64 (10). P. 4105-4120. DOI: 10.1109/TAC.2019.2893161
10. Артоболевский И.И. Теория механизмов и машин, 4-е изд., перераб., доп. М.: Наука, 1988. 384 с.
11. Bill M., Muller C., Kraus W., Executive Summary World Robotics 2019 Industrial Robots, International Federation of Robotics, 2019. С. 13-16. URL: https://ifr.org/downloads/press2018/Executive%20Summary%20WR%202019%20Industrial%20Robots.pdf (дата обращения: 09.01.2025).
12. Zhang J., Wang S., Wang H., Lai J., Bing Z., Jiang Y., Zheng Y., Zhang Z. An adaptive approach to wholebody balance control of wheel-bipedal robot Ollie. In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2022. P. 12835-12842. DOI: 10.1109/IROS47612.2022.9981985
13. Хомченко В.Г. Метод виртуальных поворотов в решении обратной задачи кинематики платформенного типа // Омский научный вестник. 2015. № 2 (140). С. 41-44. EDN: UCMPNR
14. Ту Р. Разработка программного модуля для моделирования кинематики и динамики манипулятора // Прикладная математика & Физика. 2023. № 55 (1). С. 70-83. URL: https://maths-physics-journal.ru/index.php/journal/article/view/187 (дата обращения: 04.02.25). DOI: 10.52575/2687-0959-2023-55-1-70-83
Выпуск
Другие статьи выпуска

Статья рассматривает состояние сформированности предложно-падежных конструкций у старших дошкольников с общим недоразвитием речи. На основе анализа исследований выявлены типичные ошибки, которые ведут к искажению грамматической структуры предложений, что в перспективе может негативно сказаться на письменных навыках учащихся. Формирование предложно-падежных конструкций эффективно происходит при комплексном подходе, объединяющем усилия всех участников образовательного процесса, использование разнообразных методов и вовлечение различных анализаторов. Эмпирическая часть статьи освещает ход и результаты экспериментального исследования. Анализ полученных данных показал, что многие дошкольники испытывают трудности как в освоении, так и в активном применении предложно-падежных конструкций в спонтанной речи. Детям легче выполнять задания, связанные с демонстрацией действий, нежели с устным называнием предлогов. Наибольшую сложность вызывали задания, требующие изменения названий объектов в зависимости от их числа и падежа, выбора предлогов и построения связных предложений с их использованием. Автор выделил направления коррекционной работы, включающие разработку специальной программы, учитывающей особенности каждого ребенка, его текущий уровень развития и темпы усвоения материала. Такая программа должна предусматривать систематические занятия, применение разнообразных методов обучения, а также активное участие педагогов и родителей в коррекционном процессе.

В современных условиях усиления миграционных процессов востребованы умения современных учителей работать с детьми мигрантов, осуществлять их педагогическую адаптацию в русскоязычной образовательной среде. Исследование посвящено выявлению и обоснованию педагогических условий результативной адаптации детей мигрантов при изучении естественнонаучных предметов в основной школе. Это оптимальное сочетание содержания естественнонаучных предметов с возможностями адаптивных технологий обучения; применение интеллект-карт в учебной деятельности с акцентом на когнитивный аспект; применение курсов внеурочной деятельности, ориентированных на развитие коммуникации и культуры; усиление рефлексивных действий по учету возрастных и личностных особенностей. Ведущим подходом в исследовании является инклюзивный подход, позволяющий учитывать индивидуальные потребности и культурные особенности каждого обучающегося, что способствует не только их языковой и социальной адаптации, но и общему развитию. Описана разработанная автором программа внеурочной деятельности, которая опирается на диалог культур с целью воспитания и развития у обучающихся мигрантов коммуникативных способностей, приобщения их к российской культуре (культурному наследию города обучения), принятию российской идентичности, используя материал по химии, биологии и географии. Для определения результативности педагогической адаптации выявлены четыре основных критерия и семь показателей: образовательный (показатели: качество обучения и выполнения всероссийских проверочных работ (ВПР) по естественнонаучным предметам), мотивационно-деятельностный (показатели: мотивация к обучению; участие в естественнонаучных внеклассных мероприятиях), коммуникативный (показатель - социализация), эмоциональный (показатели: тревожность; культурно-ценностные ориентиры). В результате педагогического эксперимента установлен существенный рост показателей экспериментальной группы практически по всем критериям, в сравнении с контрольной группой.

Расширение экспорта образовательных услуг приводит разработчиков образовательных программ к вопросам развития межкультурных связей и формированию у обучающихся глобальных компетенций, значение которых растет с каждым днем. В связи с этим возникает необходимость изучения способов и методов измерения уровня сформированности глобальных компетенций, что и является целью настоящего исследования. В работе проанализировано влияние программы формирования глобальных компетенций на уровень межкультурного взаимодействия студентов Кабардино-Балкарского государственного университета. Для этого проведено сравнительное исследование, основанное на данных двух анкетирований иностранных студентов, для которых проводились образовательные мероприятия, организованные сотрудниками Высшей школы международного образования и Клубом интернациональной дружбы Кабардино-Балкарского государственного университета. Анализ выявил динамические изменения в восприятии и поведении студентов, свидетельствующие о росте их межкультурной компетентности, критического мышления и толерантности. Полученные результаты подтверждают эффективность программы в подготовке студентов к взаимодействию в многонациональной среде, подчеркивают значимость межкультурного образования, необходимость дальнейших исследований в данной области, а также разработку новых образовательных стратегий, способствующих развитию глобальных компетенций и успешной адаптации студентов к современным вызовам.

Цель исследования - разработать методические рекомендации по формированию технического мышления обучающихся посредством реализации дополнительных общеразвивающих программ по 3D-моделированию на базе цифровой лаборатории вуза. В общеобразовательной области «Технология (труд)» введены инвариативные модули (3D-моделирование и прототипирование, робототехника), направленные на формирование технического мышления, профориентацию на инженерные и технические специальности. Недостаточное материально-техническое оснащение школ и зачастую низкий уровень компетенции учителей по указанным модулям обуславливают востребованность 3D-технологий в дополнительном образовании. В рамках опытно-экспериментального исследования проводилась проверка эффективности формирования компонентов технического мышления посредством реализации дополнительных общеразвивающих программ в цифровой лаборатории вуза: «Моделирование в Компас 3D» и «Моделирование в Blender 3D». Уточнено понятие и выявлены компоненты технического мышления, проанализированы возможности формирования технического мышления школьников в рамках урочной и внеурочной деятельности по технологии. Представлен опыт и результаты формирования технического мышления обучающихся в рамках реализации программ по 3D моделированию в цифровой лаборатории вуза. Разработаны методические рекомендации по формированию технического мышления при реализации дополнительных общеразвивающих программ по 3D моделированию в рамках внеурочной деятельности по предмету «Технология (труд)». Таким образом, реализация дополнительных общеобразовательных программ по 3D моделированию в рамках внеурочной деятельности по предмету технология (труд) может выступать как средство (элемент) формирования технического мышления обучающихся в условиях необходимости реализации новых инвариативных модулей по предмету «Технология (труд)».

В статье представлены опыт и результаты научно-методической работы по формированию социально безопасного поведения младших школьников, в том числе с использованием мультимедийных презентаций. Целью исследования стала оценка продуктивности включения мультимедийных презентаций в процесс формирования социально безопасного поведения младших школьников. Исследование проводилось по специально подобранным методикам ряда авторов для оценки когнитивного, эмоционально-ценностного и деятельностного критериев по таким параметрам, как поведение в толпе, в отношении опасных социальных сетей, транспорта, в ситуации «если потерялся» и при встрече с незнакомцем. При проведении занятий в серию мультимедийных презентаций были включены интерактивные сценарии, такие как тесты, кроссворды, поиск слов по буквам, ребусы, а также видеофрагменты. Они способствовали осознанию респондентами возможных рисков и негативных последствий, неверных с точки зрения безопасности действий. Установлено, что после проведения формирующего эксперимента, включающего классные часы и уроки «Окружающий мир», актуальный уровень сформированности социально безопасного поведения школьников значительно повысился. Опыт организации комбинированных занятий с включением специальных заданий с презентациями, применением интерактивных сценариев оказался результативным, так как помог школьникам визуализировать и осознавать опасности, учил справляться с конфликтными ситуациями, развивал навыки эмоционального контроля и адекватного реагирования.

Цель работы заключалась в создании дистанционного курса по дисциплине «Фармацевтическая экология» и оценке эффективности его использования при изучении студентами данной дисциплины в гибридном формате с применением дистанционных технологий. Жизненный цикл лекарственных средств включает в себя промышленный выпуск препарата, при котором неизбежно возникают экологические риски. Воздействие на окружающую среду может быть весьма существенным, и необходимо стремиться минимизировать его. В связи с этим актуально изучение дисциплины «Фармацевтическая экология», которая была введена в обучение провизоров в Институте фармации Казанского государственного медицинского университета в соответствии с учебным планом по специальности 33.05.01 Фармация в 2022-2023 учебном году. Системный анализ профессиональных компетенций, получаемых при освоении дисциплины, позволил создать дистанционный курс по данному предмету с блоком контроля знаний. Оценку эффективности использования дистанционного курса в учебном процессе производили методом анкетного опроса. Анкетированию были подвергнуты студенты четвертого курса Института фармации. Анкета состояла из двух блоков вопросов. Первый блок вопросов касался организации проведения занятий по фармацевтической экологии и отражал отношение обучающихся к изучению данной дисциплины. Второй блок вопросов касался оценки содержания и эффективности использования дистанционного курса. Все опрошенные студенты в целом очень положительно оценивают содержание дистанционного курса, отмечают его удобство и существенную помощь в подготовке к занятиям и экзамену. Регулярное анкетирование обучающихся с последующим анализом их ответов позволяет выявить те аспекты, которые требуют пересмотра, и улучшить контент образовательного ресурса.

Целью исследования стало рассмотрение элементов элективного курса «Информационно-правовые системы». В качестве методов, используемых авторами, можно выделить анализ научной и методической литературы по теме исследования и констатирующий эксперимент, включающий анкетирование и беседу, уточняющую его результаты. Площадками для проведения эксперимента выступили средняя школа № 35 г. Смоленска и Смоленский физико-математический лицей, в которых респондентами стали обучающиеся десятых классов. В исследовании была проведена оценка образовательного запроса обучающихся: оценена актуальность предлагаемого элективного курса по изучению справочных правовых систем и осуществлена попытка выбора базовой для рассмотрения материала информационной системы. В результате проведенного эксперимента была выявлена заинтересованность обучающихся в освоении навыков практического применения справочных правовых систем, при этом с самими программными продуктами респонденты знакомы слабо и не имеют ярко выраженных предпочтений. На основе полученных результатов авторами были описаны некоторые элементы элективного курса «Информационно-правовые системы», а именно: выделены цели, описан один из вариантов структуры представляемого материала и перечислены методические рекомендации по внедрению исследуемого элективного курса в образовательный процесс.

В статье рассматривается технология эдьютейнмент, которая подразумевает слияние образовательного контента с развлекательными элементами, направленное на активное вовлечение обучающихся в учебный процесс. Цель исследования - изучить особенности и преимущества применения технологии эдьютейнмент в преподавании профессионально-ориентированного иностранного языка в техническом вузе и оценить эффективность результатов обучения, полученных в ходе работы с данной технологией. Материалом исследования послужил практический опыт интеграции игровых и развлекательных элементов в преподавание дисциплины «Иностранный язык. Профессионально-ориентированный курс» для студентов технических направлений в Санкт-Петербургском политехническом университете Петра Великого. В статье представлены методические разработки для изучения одной из тем учебной программы, указаны выявленные преимущества применения технологии. Для проверки эффективности данной технологии было проведено экспериментальное обучение, по окончании которого были сопоставлены итоги промежуточной аттестации контрольных и экспериментальных групп. В результате, благодаря таким достоинствам технологии эдьютейнмент, как повышение мотивации, активная вовлеченность в речевое взаимодействие на иностранном языке, развитие творческого мышления и др., студенты технических направлений в экспериментальных группах демонстрируют более высокий уровень формирования иноязычной коммуникативной компетенции. В работе также приводятся данные анкетирования студентов, раскрывающие их отношение к внедрению элементов игры на занятиях по иностранному языку. Особо отмечается, что в данных условиях создается атмосфера непринужденного общения, позволяющая снять психологические барьеры и трудности. Проведенное исследование позволяет сделать вывод, что технология эдьютейнмент имеет большой потенциал при организации процесса обучения иностранному языку в техническом вузе.

Настоящая статья направлена на представление эмпирических результатов формирования универсальных компетенций обучающихся в условиях аспирантуры медицинского университета. Материалы статьи отражают результаты этапов педагогического эксперимента, в частности констатирующего и контрольного, что определено необходимостью фиксации роста показателей (уровней) сформированности универсальных компетенций среди аспирантов. Работа по формированию рассматриваемых компетенций осуществлялась в период 2023-2024 гг. на базе Сеченовского университета среди аспирантов трех групп (контрольной, экспериментальной, экспериментальной 2), обучающихся в разные годы (с 2022 по 2024 гг.) на первом курсе высшей медицинской школы. На основании анализа и интерпретации результатов путем количественной и статистической их обработки была определена необходимость проведения целенаправленной работы по обеспечению совершенствования отраженного уровня сформированности универсальных компетенций среди аспирантов экспериментальных групп. Оценка итоговых результатов показала значительные качественные изменения в результатах экспериментальных групп, в то время как результаты контрольной группы изменились в незначительной степени. Достоверность данных была подтверждена статистическими расчетами, что дает автору основание говорить об установлении положительного результата формирования универсальных компетенций в рамках проведенного исследования.

Использование технологий искусственного интеллекта в производственных системах приводит к значительным изменениям в управлении и принятии решений, повышая эффективность операций и снижая затраты. Внедрение этих технологий способствует цифровой трансформации производства, улучшает взаимодействие сотрудников и способствует повышению качества выпускаемой продукции. Цель работы - изучение возможностей применения технологий искусственного интеллекта для оптимизации процессов управления в производственных системах. Методология исследования основана на анализе и систематизации научной литературы, нормативно-технической документации и практических кейсов. В ходе исследования был проведен анализ 54 публикаций, из которых отобраны 23, охватывающих основные направления развития искусственного интеллекта, его интеграцию в производственные системы. Рассмотрены публикации из научных баз данных Elibrary. ru и КиберЛенинка за последние 5 лет. В ходе исследования установлено, что технологии искусственного интеллекта, такие как машинное обучение, нейронные сети, алгоритмы нечеткой логики, цифровые двойники и прогнозная аналитика, позволяют решать широкий спектр задач в производстве. Проанализированы примеры использования искусственного интеллекта в системах планирования, автоматизации процессов, логистики, управления ресурсами и контроля качества. Выявлены ключевые преимущества внедрения интеллектуальных систем, включая повышение точности прогнозирования, оптимизацию логистических маршрутов, сокращение простоев оборудования и снижение операционных затрат. Исследование подтверждает универсальность технологий искусственного интеллекта и их значимость для повышения конкурентоспособности предприятий. Развитие отраслевых стандартов внедрения искусственного интеллекта, основанных на классификации по ГОСТ Р 59277-2020, является важным направлением для дальнейшей модернизации промышленности.

Цель исследовательской работы - автоматизация расчета практической работы студентов, обучающихся в Уфимском государственном нефтяном техническом университете по направлению «Техносферная безопасность», а именно масштаба и последствий радиоактивного заражения. Для достижения поставленной цели проведен сравнительный анализ методик оценки промышленной безопасности радиационно опасных объектов, рассмотрена предметная область (оценка радиоактивного заражения территории), составлены алгоритмы для оценки радиационной обстановки по нормативной документации, проведен анализ существующих решений. Выбраны средства проектирования и инструменты разработки геоинформационной системы, позволяющей оценивать масштаб и последствия аварии на опасном производственном объекте. Приведено функциональное моделирование программного средства, включающее контекстную диаграмму верхнего уровня, а также ее декомпозицию. В результате разработано программное средство, реализующее оценку радиационной обстановки. Разработанный программный комплекс позволяет существенно уменьшить время, необходимое для расчета и графического отображения масштаба, последствий инцидента или аварии, сопровождающихся радиационным заражением местности, прилежащей к опасному объекту. Разработанная геоинформационная система может использоваться для определения размеров зон заражения радиоактивными элементами, последствий облучения персонала и территории, прилежащей к рассматриваемому объекту. Программное средство может быть применено как при составлении плана ликвидации аварии на радиационно опасном объекте, так и в процессе обучения студентов вузов (направление - «Техносферная безопасность»).

Цель исследования - разработать комплексный, нейросетевой и гидродинамического моделирования двухфазной фильтрации в призабойной зоне метод оптимизации геолого-технологических мероприятий на нефтяных скважинах, проводимых для интенсификации добычи нефти. В качестве элементов прокси-модели для формирования обучающей и тестовой выборки использовалась база данных технологических режимов скважин и эффективности обработок призабойной зоны скважин. Библиотеки оптимизаторов Python и алгоритмы глубокого обучения Pytorch применялись для выбора конкретного вида и параметров процесса. Для конкретного месторождения проведен анализ различных вариантов и эффективности воздействия на нефтяной пласт. Для определенной группы скважин анализ показал эффективность прогрева призабойной зоны скважины. На модели двухфазной фильтрации выполнено гидродинамическое моделирование. Результаты расчетов использовались для детализации процессов в пласте и как дополнение к промысловым данным для повышения качества обучающих и тестовых выборок. Показано, что прокси-моделирование, представляющее собой комбинацию алгоритмов машинного обучения и упрощенного гидродинамического моделирования, позволяет прогнозировать эффективность и оптимизировать процесс планирования программ геолого-технологических мероприятий на нефтяной скважине, повысить рентабельность добычи нефти. Разработанная модель на основе алгоритмов глубокого машинного обучения и гидродинамического моделирования открывает широкие возможности для анализа других видов обработки призабойной зоны, физико-химического воздействия на нефтяной пласт.

Статья посвящена изучению влияния электромагнитного поля индуктора на образцы металла, расплавляемые в нем во взвешенном состоянии. В работе описан метод определения численных значений коэффициента неоднородности электромагнитного поля в зависимости от положения расплава в индукторе при плавании во взвешенном состоянии. Приведено описание параметров численной модели напряженности электромагнитного поля конического индуктора. В работе представлены полученные результаты численных экспериментов и установленные по ним зависимости коэффициента неоднородности электромагнитного поля. Анализ показал, что распределение электромагнитного поля в индукторе в существенной мере зависит от геометрических параметров образца и его положения. В ходе экспериментов с численной моделью было установлено, что при увеличении радиуса образца область устойчивой левитации расплава смещается вниз к основанию индуктора, что связано с перераспределением напряженности магнитного поля. Полученные зависимости позволяют более точно прогнозировать условия устойчивой левитации металла. Разработанная численная модель, основанная на методе конечных элементов, может быть использована для проектирования систем контроля и управления процессом плавки во взвешенном состоянии. Результаты исследования могут найти применение в технологиях получения высокочистых металлов.

Цель работы заключается в сравнительном анализе производительности алгоритмов Document Object Model, Simple API for XML и Streaming API for XML при выполнении задач чтения, записи и частичного чтения XML-файлов различного объема. Для проведения экспериментов была разработана модульная программа на языке Java, где каждый алгоритм реализован в отдельном модуле. В качестве данных использовались синтетически сгенерированные XML-файлы с типовой структурой, имитирующей транзакции. Эксперименты проводились с замером ключевых метрик, таких как время выполнения и потребление памяти. В ходе исследования были выявлены сильные и слабые стороны каждого алгоритма. Simple API for XML продемонстрировал наилучшую производительность и минимальное потребление памяти, что делает его подходящим для обработки больших объемов данных. Streaming API for XML обеспечил баланс между производительностью и удобством реализации, предоставляя более простой доступ к данным. Document Object Model, несмотря на удобный интерфейс, оказался слишком ресурсоемким и может быть использован только для небольших объемов данных. Результаты работы подчеркивают важность выбора алгоритма обработки XML в зависимости от специфики задач. Simple API for XML и Streaming API for XML являются предпочтительными для высоконагруженных систем, требующих минимизации затрат на ресурсы. Дальнейшие исследования могут быть направлены на изучение альтернативных форматов данных и их интеграции с современными архитектурными подходами.

Цель исследования заключается в разработке нового архитектурного решения, обеспечивающего внедрение моделей потокового машинного обучения на основе методов и алгоритмов потоковой обработки многомодальных данных и машинного обучения в потоковой интеллектуальной образовательной системе для повышения персонализации образовательного процесса и автоматической адаптации учебных материалов под уровень знаний обучающихся в реальном времени. В работе описаны процессы передачи и обработки данных из различных многомодальных источников в модель потокового машинного обучения. Для нормализации данных применяется адаптивный метод скользящих окон, позволяющий корректно обрабатывать непрерывный поток информации с учетом временной синхронизации. Особое внимание в исследовании уделено вопросу контроля использования оперативной памяти для обеспечения стабильного функционирования системы в условиях ограниченности вычислительных ресурсов в образовательных организациях. Экспериментальные результаты, визуализированные на графиках и в таблице, демонстрируют эффективность интеграции нескольких алгоритмов потокового машинного обучения, таких как адаптивный случайный лес, инкрементальный алгоритм дерева решений для задач классификации и регрессии, в единую модель. Предложенная архитектура, которая сопровождается схемой, характеризуется высокой масштабируемостью, легкостью интеграции с существующими образовательными платформами и адаптивностью к изменяющимся условиям использования, что открывает перспективы дальнейших исследований и практического применения в образовательных технологиях.

Цель работы - разработка и апробация методики комплексной оценки приоритетности технологий на примере угольной отрасли. Выявление и оценка потенциала перспективных технологий - важное условие экономического роста и национальной энергетической безопасности страны. Для оценки потенциала был разработан алгоритм вычисления интегрального показателя применимости технологий, который на основе многомерного набора факторов и критериев позволил оценить приоритетность технологий для формирования высокотехнологичных цепочек создания стоимости в угольной и смежных отраслях, способных обеспечить устойчивый рост и технологический суверенитет в условиях нечеткой входной информации (субъективных оценок экспертов). При разработке и апробации интегрального показателя использовались методы патентного анализа и нечетко-логический алгоритм поддержки принятия решений Fuzzy Analytic Hierarchy Process. Исследование проведено на примере отечественной угольной отрасли, в которой проблемы формирования технологического суверенитета стоят наиболее остро. Источниками информации послужили патентная информация, размещенная в патентно-аналитической системе Orbit Intelligence Premium edition, результаты экспертного опроса. Предлагаемая методика включает в себя пять этапов: 1) формирование патентной коллекции; 2) отбор и оценка наиболее технологически значимых патентных семейств; 3) опрос экспертов; 4) построение иерархической модели, 5) расчет интегрального показателя применимости технологий. Методика может быть использована для выявления и оценки приоритетности технологий и для других отраслей.

Цель работы: моделирование процессов, происходящих в топочных камерах трубчатых печей пиролиза углеводородов, в случае расположения ярусов настенных горелок как на боковых стенах, так и на поду и своде печи. Взаимосвязанные процессы описываются системой дифференциальных уравнений в частных производных, которые включают условия сохранения энергии и количества движения, уравнения модели горения топливного газа в воздухе и уравнения переноса лучистой энергии. Проведены численные исследования с целью прогнозирования температурного состояния элементов печи в случае изменения расположения ярусов большого количества горелок небольшой мощности на футерованных стенах топочной камеры печи в виде прямоугольного параллелепипеда. Применение горелок, расположенных в различных местах топки печи, приводит к образованию сложных полей температуры и скоростей дымовых газов в радиантной камере. Теплота для проведения крекинга углеводородов в трубчатых реакторах в основном поступает за счет переноса энергии излучения продуктов сгорания, микроскопических частиц сажи и футеровок топки. В некоторых действующих установках по 8 ярусов горелки расположены только на двух боковых стенках радиантной камеры топки, что приводит к неравномерному распределению тепловых потоков по высоте трубчатого змеевика. В результате численного интегрирования системы дифференциальных уравнений получены поля скоростей и температуры в объеме топки, а также теплонапряженности реакционных труб. Расчеты показали, что при модернизации действующей печи путем расположения некоторых ярусов горелок на поду и на своде топки сохранением их общего количества удастся добиться более равномерного распределения поверхностных плотностей тепловых потоков вдоль реакционных труб.

Цель данной работы заключалась в создании модели, позволяющей спрогнозировать поведение смазочного материала в условиях эксплуатации подшипника скольжения с учетом более сложных факторов, таких как сжимаемость и изменение вязкости под воздействием давления. Разработка модели учитывает комплексное поведение микрополярного смазочного материала, который проявляет изменения вязкости под воздействием давления. Кроме того, необходимо учитывать взаимодействие смазочного материала с атмосферными газами, что может влиять на его сжимаемость и, следовательно, на общие эксплуатационные свойства. Основной аспект предлагаемой модификации конструкции радиального подшипника - наличие полимерного покрытия с канавкой. Такое решение позволяет достичь более равномерного и эффективного распределения смазочного материала по поверхности подшипника. Канавка, выполненная в слое полимерного покрытия, способствует направлению смазки в зону трения, минимизируя контактный износ и снижая коэффициент трения. Разработанный подход основывается на интеграции методов математического моделирования и экспериментального анализа, что позволяет учитывать сложные физико-химические свойства смазочного материала. Для оценки сжимаемости конструкции радиального подшипника скольжения применяется нелинейная модель. В рамках этой модели давление и температура рассматриваются как взаимосвязанные параметры, оказывающие влияние на вязкость микрополярного смазочного материала. Итогом исследования является новая расчетная модель, способствующая повышению точности определения эксплуатационных характеристик подшипника на стадии его проектирования.

Работа посвящена анализу процесса сборки выпускаемой продукции на ПАО «Туймазинский завод автобетоновозов». Цель исследования заключается в анализе существующей системы управления процессом сборки продукции, выявлении недостатков и приведении системы управления процессом сборки продукции к требованиям менеджмента качества для поддержания ритмичного выпуска продукции заданного качества в запланированной номенклатуре и объемах в соответствии с установленными сроками ее поставок потребителям и повышения производительности труда на производстве. В статье описывается разработанная система управления процессом сборки продукции в соответствии с требованиями менеджмента качества, системы экологического менеджмента и системы менеджмента охраны здоровья и безопасности труда на ПАО «Туймазинский завод автобетоновозов». Результаты, полученные в ходе проведенных исследований, показали, что не все нормативные акты и технологические регламенты выполняются в полной мере, отдельные технологические процессы устарели, поэтому необходима их модернизация. В результате проведенного анализа процесса сборки продукции на основе требований менеджмента качества сделаны выводы, что для успешного функционирования предприятия необходимо провести аудит всех технологических процессов по подготовке комплектующих и сборке продукции, привести их в соответствие с новыми требованиями предприятия, провести работу с персоналом и разработать систему мотивации. В отдельных случаях требуется полная модернизация процессов и разработка новых методологий сборки продукции.
Статистика статьи
Статистика просмотров за 2025 - 2026 год.
Издательство
- Издательство
- ИД АКАДЕМИЯ ЕСТЕСТВОЗНАНИЯ
- Регион
- Россия, Пенза
- Почтовый адрес
- 440026, Пензенская обл., г Пенза, ул. Московская, влд. 27
- Юр. адрес
- 440026, Пензенская обл., г Пенза, ул. Московская, влд. 27
- ФИО
- Бизенков Кирилл Александрович (ДИРЕКТОР)
- E-mail адрес
- edition@rae.ru
- Контактный телефон
- +7 (841) 2304108
- Сайт
- https://rae.ru/ru